Força paralela ao deslocamento
Quando a força é paralela ao deslocamento, ou seja, o vetor deslocamento e a força não formam ângulo entre si, calculamos o trabalho:
Exemplo:
Qual o trabalho realizado por um força aplicada a um corpo de massa 5kg e que causa um aceleração de 1,5m/s² e se desloca por uma distância de 100m?

Força não-paralela ao deslocamento
Sempre que a força não é paralela ao deslocamento, devemos decompor o vetor em suas componentes paralelas e perpendiculares:
Considerando  a componente perpendicular da Força e
a componente perpendicular da Força e  a componente paralela da força.
a componente paralela da força.
Ou seja:

Quando o móvel se desloca na horizontal, apenas as forças paralelas ao deslocamento produzem trabalho. Logo:
Exemplo:
Uma força de intensidade 30N é aplicada a um bloco formando um ângulo de 60° com o vetor deslocamento, que tem valor absoluto igual a 3m. Qual o trabalho realizado por esta força?
Podemos considerar sempre este caso, onde aparece o cosseno do ângulo, já que quando a força é paralela ao deslocamento, seu ângulo é 0° e cos0°=1, isto pode ajudar a entender porque quando a força é contrária ao deslocamento o trabalho é negativo, já que:
O cosseno de um ângulo entre 90° e 180° é negativo, sendo cos180°=-1
Trabalho de uma força variável
Para calcular o trabalho de uma força que varia devemos empregar técnicas de integração, que é uma técnica matemática estudada no nível superior, mas para simplificar este cálculo, podemos calcular este trabalho por meio do cálculo da área sob a curva no diagrama 
Calcular a área sob a curva é uma técnica válida para forças que não variam também.
Trabalho da força Peso
Para realizar o cálculo do trabalho da força peso, devemos considerar a trajetória como a altura entre o corpo e o ponto de origem, e a força a ser empregada, a força Peso.
Então:

A unidade de potência no SI - Sistema Internacional de Unidades é o watt (W).
Além do watt, usa-se com frequência as unidades:
1kW (1 quilowatt) = 1000W
1MW (1 megawatt) = 1000000W = 1000kW
1cv (1 cavalo-vapor) = 735W
1HP (1 horse-power) = 746W
Potência Média
Definimos a partir daí potência média relacionando o Trabalho com o tempo gasto para realizá-lo:
Como sabemos que:
Então:
Potência Instantânea
Quando o tempo gasto for infinitamente pequeno teremos a potência instantânea, ou seja:
Exemplo:
Qual a potência média que um corpo desenvolve quando aplicada a ele uma força horizontal com intensidade igual a 12N, por um percurso de 30m, sendo que o tempo gasto para percorrê-lo foi 10s?
E a potência instantânea no momento em que o corpo atingir 2m/s?
Energia é a capacidade de executar um trabalho.
Energia mecânica é aquela que acontece devido ao movimento dos corpos ou armazenada nos sistemas físicos.
Dentre as diversas energias conhecidas, as que veremos no estudo de dinâmica são:
- Energia Cinética;
- Energia Potencial Gravitacional;
- Energia Potencial Elástica;
Energia Cinética
É a energia ligada ao movimento dos corpos. Resulta da transferência de energia do sistema que põe o corpo em movimento.
Sua equação é dada por:
Utilizando a equação de Torricelli e considerando o inicio do movimento sendo o repouso, teremos:
Substituindo no cálculo do trabalho:

A unidade de energia é a mesma do trabalho: o Joule (J)
Teorema da Energia Cinética
Considerando um corpo movendo-se em MRUV.
O Teorema da Energia Cinética (TEC) diz que:
"O trabalho da força resultante é medido pela variação da energia cinética."
Ou seja:
Exemplo:
Qual o trabalho realizado por um corpo de massa 10kg que inicia um percurso com velocidade 10m/s² até parar?
Energia Potencial
Energia Potencial é a energia que pode ser armazenada em um sistema físico e tem a capacidade de ser transformada em energia cinética.
Conforme o corpo perde energia potencial ganha energia cinética ou vice-e-verso.
Energia Potencial Gravitacional
É a energia que corresponde ao trabalho que a força Peso realiza.
É obtido quando consideramos o deslocamento de um corpo na vertical, tendo como origem o nível de referência (solo, chão de uma sala, ...).
Enquanto o corpo cai vai ficando mais rápido, ou seja, ganha Energia Cinética, e como a altura diminui, perde Energia Potencial Gravitacional.
Energia Potencial Elástica
Corresponde ao trabalho que a força Elástica realiza.
Como a força elástica é uma força variável, seu trabalho é calculado através do cálculo da área do seu gráfico, cuja Lei de Hooke diz ser:
Como a área de um triângulo é dada por:
Então:
Conservação de Energia Mecânica
A energia mecânica de um corpo é igual a soma das energias potenciais e cinética dele.
Então:
Qualquer movimento é realizado através de transformação de energia, por exemplo, quando você corre, transforma a energia química de seu corpo em energia cinética. O mesmo acontece para a conservação de energia mecânica.
Podemos resolver vários problemas mecânicos conhecendo os princípios de conservação de energia.
Por exemplo, uma pedra que é abandonada de um penhasco. Em um primeiro momento, antes de ser abandonada, a pedra tem energia cinética nula (já que não está em movimento) e energia potencial total. Quando a pedra chegar ao solo, sua energia cinética sera total, e a energia potencial nula (já que a altura será zero).
Dizemos que a energia potencial se transformou, ou se converteu, em energia cinética.
Quando não são consideradas as forças dissipativas (atrito, força de arraste, etc.) a energia mecânica é conservada, então:
Para o caso de energia potencial gravitacional convertida em energia cinética, ou vice-versa:
Para o caso de energia potencial elástica convertida em energia cinética, ou vice-versa:
Exemplos:
1) Uma maçã presa em uma macieira a 3 m de altura se desprende. Com que velocidade ela chegará ao solo?
2) Um bloco de massa igual a 10kg se desloca com velocidade constante igual a 12m/s, ao encontrar uma mola de constante elástica igual a 2000N/m este diminui sua velocidade até parar, qual a compressão na mola neste momento?
Como já vimos, para que um corpo entre em movimento, é necessário que haja um interação entre dois corpos.
Se considerarmos o tempo que esta interação acontece, teremos o corpo sob ação de uma força constante, durante um intervalo de tempo muito pequeno, este será o impulso de um corpo sobre o outro:
As características do impulso são:
- Módulo:

- Direção: a mesma do vetor F.
- Sentido: o mesmo do vetor F.
A unidade utilizada para Impulso, no SI, é: N.s
No gráfico de uma força constante, o valor do impulso é numericamente igual à área entre o intervalo de tempo de interação:
A = F.Δt = I
Se observarmos uma partida de bilhar, veremos que uma bolinha transfere seu movimento totalmente ou parcialmente para outra.
A grandeza física que torna possível estudar estas transferências de movimento é a quantidade de movimento linear  , também conhecido como quantidade de movimento ou momentum linear.
, também conhecido como quantidade de movimento ou momentum linear.
A quantidade de movimento relaciona a massa de um corpo com sua velocidade:
Como características da quantidade de movimento temos:
- Módulo:

- Direção: a mesma da velocidade.
- Sentido: a mesma da velocidade.
- Unidade no SI: kg.m/s.
Exemplo:
Qual a quantidade de movimento de um corpo de massa 2kg a uma velocidade de 1m/s?
Teorema do Impulso
Considerando a 2ª Lei de Newton:
E utilizando-a no intervalo do tempo de interação:
mas sabemos que:  , logo:
, logo:
Como vimos:
então:
"O impulso de uma força, devido à sua aplicação em certo intervalo de tempo, é igual a variação da quantidade de movimento do corpo ocorrida neste mesmo intervalo de tempo."
Exemplo:
Quanto tempo deve agir uma força de intensidade 100N sobre um corpo de massa igual a 20kg, para que sua velocidade passe de 5m/s para 15m/s?
Conservação da Quantidade de Movimento
Assim como a energia mecânica, a quantidade de movimento também é mantida quando não há forças dissipativas, ou seja, o sistema é conservativo, fechado ou mecanicamente isolado.
Um sistema é conservativo se:
Então, se o sistema é conservativo temos:
Como a massa de um corpo, ou mesmo de um sistema, dificilmente varia, o que sofre alteração é a velocidade deles.
Exemplo:
Um corpo de massa 4kg, se desloca com velocidade constante igual a 10m/s. Um outro corpo de massa 5kg é lançado com velocidade constante de 20m/s em direção ao outro bloco. Quando os dois se chocarem ficarão presos por um velcro colocado em suas extremidades. Qual será a velocidade que os corpos unidos terão?
Princípios Básicos
A estática é a parte da física que se preocupa em explicar questões como:
- Por que em uma mesa sustentada por dois pés, estes precisam estar em determinada posição para que esta não balance?
- Por que a maçaneta de uma porta sempre é colocada no ponto mais distante das dobradiças dela?
- Por que um quadro pendurado em um prego precisa estar preso exatamente em sua metade?
- Por que é mais fácil quebrar um ovo pelas laterais do que por suas extremidades?
Princípio da transmissibilidade das forças
O efeito de uma força não é alterado quando esta é aplicada em diferentes pontos do corpo, desde que esta seja aplicada ao longo de sua linha de aplicação.

Nos três casos o efeito da força é o mesmo.
Equilíbrio
As situações em que um corpo pode estar em equilíbrio são:
- Equilíbrio estático: Ocorre quando o ponto ou corpo está perfeitamente parado (
 ).
). - Equilíbrio dinâmico: Ocorre quando o ponto ou corpo está em Movimento Uniforme
 .
.
Para que um ponto esteja em equilíbrio precisa satisfazer a seguinte condição:
A resultante de todas as forças aplicadas a este ponto deve ser nula.
Exemplos:
(1) Para que o ponto A, de massa 20kg, esteja em equilíbrio qual deve ser a intensidade da força  ?
?
Sendo:
Mas como a força Peso e a força Normal têm sentidos opostos, estas se anulam.
E, seguindo a condição de equilíbrio:

Chamamos de corpo rígido ou corpo extenso, todo o objeto que não pode ser descrito por um ponto.
Para conhecermos o equilíbrio nestes casos é necessário estabelecer dois conceitos:
Centro de massa
Um corpo extenso pode ser considerado um sistema de partículas, cada uma com sua massa.
A resultante total das massas das partículas é a massa total do corpo. Seja CM o ponto em que podemos considerar concentrada toda a massa do corpo, este ponto será chamado Centro de Massa do corpo.
Para corpos simétricos, que apresentam distribuição uniforme de massa, o centro de massa é o próprio centro geométrico do sistema. Como no caso de uma esfera homogênea, ou de um cubo perfeito.
Para os demais casos, o cálculo do centro de massa é feito através da média aritmética ponderada das distâncias de cada ponto do sistema.
Para calcularmos o centro de massa precisamos saber suas coordenadas em cada eixo do plano cartesiano acima, levando em consideração a massa de cada partícula:
Então o Centro de Massa do sistema de partículas acima está localizado no ponto (1,09 , 0,875), ou seja:
Como forma genérica da fórmula do centro de massa temos:
Momento de uma força
Imagine uma pessoa tentando abrir uma porta, ela precisará fazer mais força se for empurrada na extremidade contrária à dobradiça, onde a maçaneta se encontra, ou no meio da porta?
Claramente percebemos que é mais fácil abrir ou fechar a porta se aplicarmos força em sua extremidade, onde está a maçaneta. Isso acontece, pois existe uma grandeza chamada Momento de Força  , que também pode ser chamado Torque.
, que também pode ser chamado Torque.
Esta grandeza é proporcional a Força e a distância da aplicação em relação ao ponto de giro, ou seja:
A unidade do Momento da Força no sistema internacional é o Newton-metro (N.m)
Como este é um produto vetorial, podemos dizer que o módulo do Momento da Força é:
Sendo:
M= Módulo do Momento da Força.
F= Módulo da Força.
d=distância entre a aplicação da força ao ponto de giro; braço de alavanca.
sen θ=menor ângulo formado entre os dois vetores.
Como  , se a aplicação da força for perpendicular à d o momento será máximo;
, se a aplicação da força for perpendicular à d o momento será máximo;
Como  , quando a aplicação da força é paralela à d, o momento é nulo.
, quando a aplicação da força é paralela à d, o momento é nulo.
E a direção e o sentido deste vetor são dados pela Regra da Mão Direita.
O Momento da Força de um corpo é:
- Positivo quando girar no sentido anti-horário;
- Negativo quando girar no sentido horário;
Exemplo:
Qual o momento de força para uma força de 10N aplicada perpendicularmente a uma porta 1,2m das dobradiças?
Condições de equilíbrio de um corpo rígido
Para que um corpo rígido esteja em equilíbrio, além de não se mover, este corpo não pode girar. Por isso precisa satisfazer duas condições:
- O resultante das forças aplicadas sobre seu centro de massa deve ser nulo (não se move ou se move com velocidade constante).
- O resultante dos Momentos da Força aplicadas ao corpo deve ser nulo (não gira ou gira com velocidade angular constante).
Tendo as duas condições satisfeitas, qualquer corpo pode ficar em equilíbrio, como esta caneta:
Exemplo:
(1) Em um circo, um acrobata de 65kg se encontra em um trampolim uniforme de 1,2m, a massa do trampolim é 10kg. A distância entre a base e o acrobata é 1m. Um outro integrante do circo puxa uma corda presa à outra extremidade do trampolim, que está a 10cm da base. Qual a força que ele tem de fazer para que o sistema esteja em equilíbrio.
Como o trampolim é uniforme, seu centro de massa é exatamente no seu meio, que está localizado a uma distância de 0,5m da base. Então, considerando cada força:
Pela segunda condição de equilíbrio:
Até agora estudamos o comportamento dos planos e corpos em um meio onde há ar ou vácuo, ou seja, o meio não interfere no comportamento.
Mas e se aplicarmos uma força em um corpo que se encontra sobre a água ou outro fluido qualquer?
Sabemos que o efeito será diferente. Se estudarmos as propriedades de um líquido em equilíbrio estático, estas propriedades podem ser estendidas aos demais fluidos.
Chamamos hidrostática a ciência que estuda os líquidos em equilíbrio estático.
Fluido
Fluido é uma substância que tem a capacidade de escoar. Quando um fluido é submetido a uma força tangencial, deforma-se de modo contínuo, ou seja, quando colocado em um recipiente qualquer, o fluido adquire o seu formato.
Podemos considerar como fluidos líquidos e gases.
Particularmente, ao falarmos em fluidos líquidos, devemos falar em sua viscosidade, que é a atrito existente entre suas moléculas durante um movimento. Quanto menor a viscosidade, mais fácil o escoamento do fluido.
Pressão
Ao observarmos uma tesoura, vemos que o lado onde ela corta, a lâmina, é mais fina que o restante da tesoura. Também sabemos que quanto mais fino for o que chamamos o "fio da tesoura", melhor esta irá cortar.
Isso acontece, pois ao aplicarmos uma força, provocamos uma pressão diretamente proporcional a esta força e inversamente proporcional a área da aplicação.
No caso da tesoura, quanto menor for o "fio da tesoura" mais intensa será a pressão de uma força nela aplicada.
A unidade de pressão no SI é o Pascal (Pa), que é o nome adotado para N/m².
Matematicamente, a pressão média é igual ao quociente da resultante das forças perpendiculares à superfície de aplicação e a área desta superfície.
Sendo:
p= Pressão (Pa)
F=Força (N)
A=Área (m²)
Exemplo:
Uma força de intensidade 30N é aplicada perpendicularmente à superfície de um bloco de área 0,3m², qual a pressão exercida por esta força?
Densidade
Quando comparamos dois corpos formados por materiais diferentes, mas com um mesmo volume, quando dizemos que um deles é mais pesado que o outro, na verdade estamos nos referindo a sua densidade. A afirmação correta seria que um corpo é mais denso que o outro.
A unidade de densidade no SI é kg/m³.
A densidade é a grandeza que relaciona a massa de um corpo ao seu volume.
Onde:
d=Densidade (kg/m³)
m=Massa (kg)
V=Volume (m³)
Exemplo:
Qual a massa de um corpo de volume 1m³, se este corpo é feito de ferro?
Dado: densidade do ferro=7,85g/cm³
Convertendo a densidade para o SI:

Pressão hidrostática
Da mesma forma como os corpos sólidos, os fluidos também exercem pressão sobre outros, devido ao seu peso.
Para obtermos esta pressão, consideremos um recipiente contendo um líquido de densidade d que ocupa o recipiente até uma altura h, em um local do planeta onde a aceleração da gravidade é g.
A Força exercida sobre a área de contato é o peso do líquido.
como: 
a massa do líquido é: 
mas  , logo:
, logo:
Ou seja, a pressão hidrostática não depende do formato do recipiente, apenas da densidade do fluido, da altura do ponto onde a pressão é exercida e da aceleração da gravidade.
Pressão atmosférica
Atmosfera é uma camada de gases que envolve toda a superfície da Terra.
Aproximadamente todo o ar presente na Terra está abaixo de 18000 metros de altitude. Como o ar é formado por moléculas que tem massa, o ar também tem massa e por consequência peso.
A pressão que o peso do ar exerce sobre a superfície da Terra é chamada Pressão Atmosférica, e seu valor depende da altitude do local onde é medida.
Quanto maior a altitude menor a pressão atmosférica e vice-versa.
Seja um líquido qualquer de densidade d em um recipiente qualquer.
Escolhemos dois pontos arbitrários R e T.
As pressões em Q e R são:
A diferença entre as pressões dos dois pontos é:
Teorema de Stevin:
"A diferença entre as pressões de dois pontos de um fluido em equilíbrio é igual ao produto entre a densidade do fluido, a aceleração da gravidade e a diferença entre as profundidades dos pontos."
|
Através deste teorema podemos concluir que todos os pontos a uma mesma profundidade, em um fluido homogêneo (que tem sempre a mesma densidade) estão submetidos à mesma pressão.
Quando aplicamos uma força a um líquido, a pressão causada se distribui integralmente e igualmente em todas as direções e sentidos.
Pelo teorema de Stevin sabemos que:
Então, considerando dois pontos, A e B:
Ao aplicarmos uma força qualquer, as pressões no ponto A e B sofrerão um acréscimo:
Se o líquido em questão for ideal, ele não sofrerá compressão, então a distância h, será a mesma após a aplicação da força.
Assim:
Teorema de Pascal:
"O acréscimo de pressão exercida num ponto em um líquido ideal em equilíbrio se transmite integralmente a todos os pontos desse líquido e às paredes do recipiente que o contém."
Prensa hidráulica
Uma das principais aplicações do teorema de Pascal é a prensa hidráulica.
Esta máquina consiste em dois cilindros de raios diferentes A e B, interligados por um tubo, no seu interior existe um líquido que sustenta dois êmbolos de áreas diferentes  e
e  .
.
Se aplicarmos uma força de intensidade F no êmbolo de área , exerceremos um acréscimo de pressão sobre o líquido dado por:
Pelo teorema de Pascal, sabemos que este acréscimo de pressão será transmitido integralmente a todos os pontos do líquido, inclusive ao êmbolo de área , porém transmitindo um força diferente da aplicada:
Como o acréscimo de pressão é igual para ambas as expressões podemos igualá-las:
Exemplo:
Considere o sistema a seguir:
Dados:

Qual a força transmitida ao êmbolo maior?

Ao entrarmos em uma piscina, nos sentimos mais leves do que quando estamos fora dela.
Isto acontece devido a uma força vertical para cima exercida pela água a qual chamamos Empuxo, e a representamos por  .
.
O Empuxo representa a força resultante exercida pelo fluido sobre um corpo. Como tem sentido oposto à força Peso, causa o efeito de leveza no caso da piscina.
A unidade de medida do Empuxo no SI é o Newton (N).
Princípio de Arquimedes
Foi o filósofo, matemático, físico, engenheiro, inventor e astrônomo grego Arquimedes (287a.C. - 212a.C.) quem descobriu como calcular o empuxo.
Arquimedes descobriu que todo o corpo imerso em um fluido em equilíbrio, dentro de um campo gravitacional, fica sob a ação de uma força vertical, com sentido oposto à este campo, aplicada pelo fluido, cuja intensidade é igual a intensidade do Peso do fluido que é ocupado pelo corpo.
Assim:
onde:
g=Aceleração da gravidade (m/s²)
Exemplo:
Em um recipiente há um líquido de densidade 2,56g/cm³. Dentro do líquido encontra-se um corpo de volume 1000cm³, que está totalmente imerso. Qual o empuxo sofrido por este corpo? Dado g=10m/s²
Saiba mais...
O valor do empuxo não depende da densidade do corpo que é imerso no fluido, mas podemos usá-la para saber se o corpo flutua, afunda ou permanece em equilíbrio com o fluido:
Se:
|
Peso aparente
Conhecendo o princípio de Arquimedes podemos estabelecer o conceito de peso aparente, que é o responsável, no exemplo dado da piscina, por nos sentirmos mais leves ao submergir.
Peso aparente é o peso efetivo, ou seja,aquele que realmente sentimos. No caso de um fluido:
Força gravitacional
Ao estudar o movimento da Lua, Newton concluiu que a força que faz com que ela esteja constantemente em órbita é do mesmo tipo que a força que a Terra exerce sobre um corpo em suas proximidades. A partir daí criou a Lei da Gravitação Universal.
Lei da Gravitação Universal de Newton:
"Dois corpos atraem-se com força proporcional às suas massas e inversamente proporcional ao quadrado da distância que separa seus centros de gravidade."
Onde:
F=Força de atração gravitacional entre os dois corpos
G=Constante de gravitação universal
M e m = massa dos corpos
d=distância entre os centros de gravidade dos corpos.
Nas proximidades da Terra a aceleração da gravidade varia, mas em toda a Litosfera (camada em que há vida) esta pode ser considerada constante, seus valores para algumas altitudes determinadas são:
| Altitude (km) | Aceleração da Gravidade (m/s²) | Exemplo de altitude |
|---|---|---|
0
|
9,83
|
nível do mar
|
8,8
|
9,80
|
cume do Monte Everest
|
36,6
|
9,71
|
maior altura atingida por balão tripulado
|
400
|
8,70
|
órbita de um ônibus espacial
|
35700
|
0,225
|
satélite de comunicação
|
Quando o ser humano iniciou a agricultura, ele necessitou de uma referência para identificar as épocas de plantio e colheita.
Ao observar o céu, os nossos ancestrais perceberam que alguns astros descrevem um movimento regular, o que propiciou a eles obter uma noção de tempo e de épocas do ano.
Primeiramente, foi concluído que o Sol e os demais planetas observados giravam em torno da Terra. Mas este modelo, chamado de Modelo Geocêntrico, apresentava diversas falhas, que incentivaram o estudo deste sistema por milhares de anos.
Por volta do século XVI, Nicolau Copérnico (1473-1543) apresentou um modelo Heliocêntrico, em que o Sol estava no centro do universo, e os planetas descreviam órbitas circulares ao seu redor.
No século XVII, Johanes Kepler (1571-1630) enunciou as leis que regem o movimento planetário, utilizando anotações do astrônomo Tycho Brahe (1546-1601).
Kepler formulou três leis que ficaram conhecidas como Leis de Kepler.
1ª Lei de Kepler - Lei das Órbitas
Os planetas descrevem órbitas elipticas em torno do Sol, que ocupa um dos focos da elipse.
2ª Lei de Kepler - Lei das Áreas
O segmento que une o sol a um planeta descreve áreas iguais em intervalos de tempo iguais.
3ª Lei de Kepler - Lei dos Períodos
O quociente dos quadrados dos períodos e o cubo de suas distâncias médias do sol é igual a uma constante k, igual a todos os planetas.

Tendo em vista que o movimento de translação de um planeta é equivalente ao tempo que este demora para percorrer uma volta em torno do Sol, é fácil concluirmos que, quanto mais longe o planeta estiver do Sol, mais longo será seu período de translação e, em consequência disso, maior será "seu ano".
No estudo de astronomia muitas vezes as unidades do Sistema Internacional (SI) são ineficientes pois as distâncias que devem ser expressas são muito grandes.
Por exemplo: A distância da Terra até Marte é de cerca de 75 milhões de quilômetros, que no SI é expresso por 75 000 000 000 metros.
Devido à necessidade de unidades mais eficientes são utilizadas: Unidade Astronômica (UA), Anos-luz (AL) e Parsec (Pc).
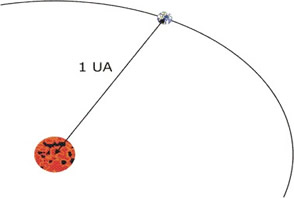
Unidade Astronômica (UA)
É a distância média entre a Terra e o Sol. É empregada principalmente para descrever órbitas e distâncias dentro do Sistema Solar.
O tamanho médio da órbita dos planetas do Sistema Solar, ou seja, sua distância ao Sol é:
Planeta
|
Distância ao Sol (UA)
|
Mercúrio
|
0,39
|
Vênus
|
0,72
|
Terra
|
1,00
|
Marte
|
1,52
|
Júpter
|
5,20
|
Saturno
|
9,53
|
Urano
|
19,10
|
Netuno
|
30,00
|
Ano-Luz (al)
É a distância percorrida pela luz, no vácuo, no tempo de 1 ano terrestre.
Sendo a velocidade da luz c = 299 792,458 km/s, temos que:
1 al = 9 460 536 207 068 016 m = 63241,07710 UA
A estrela mais próxima do Sol é chamada Próxima Centauri, localizada na constelação de Centauro. A sua distância ao Sol é de 4,22 al
Parsec (Pc)
É a distância na qual 1 UA é representada por 1'' (1 segundo de arco), em uma medição por paralaxe.
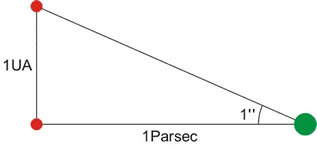
Esta unidade é usada para distância muito grandes, como a distância entre estrelas, entre galáxias ou de objetos muito distantes, como quasares.
Chamamos de Termologia a parte da física que estuda os fenômenos relativos ao calor, aquecimento, resfriamento, mudanças de estado físico, mudanças de temperatura, etc. Termometria é a parte da termologia voltada para o estudo da temperatura, dos termômetros e das escalas termométricas.
Temperatura
Temperatura é a grandeza que caracteriza o estado térmico de um corpo ou sistema.
Fisicamente o conceito dado a quente e frio é um pouco diferente do que costumamos usar no nosso cotidiano. Podemos definir como quente um corpo que tem suas moléculas agitando-se muito, ou seja, com alta energia cinética. Analogamente, um corpo frio, é aquele que tem baixa agitação das suas moléculas.
Ao aumentar a temperatura de um corpo ou sistema pode-se dizer que está se aumentando o estado de agitação de suas moléculas.
Ao tirarmos uma garrafa de água mineral da geladeira ou ao retirar um bolo de um forno, percebemos que após algum tempo, ambas tendem a chegar à temperatura do ambiente. Ou seja, a água "esquenta" e o bolo "esfria". Quando dois corpos ou sistemas atingem o mesma temperatura, dizemos que estes corpos ou sistemas estão em equilíbrio térmico.
Para que seja possível medir a temperatura de um corpo, foi desenvolvido um aparelho chamado termômetro.
O termômetro mais comum é o de mercúrio, que consiste em um vidro graduado com um bulbo de paredes finas que é ligado a um tubo muito fino, chamado tubo capilar.
Quando a temperatura do termômetro aumenta, as moléculas de mercúrio aumentam sua agitação fazendo com que este se dilate, preenchendo o tubo capilar. Para cada altura atingida pelo mercúrio está associada uma temperatura.
A escala de cada termômetro corresponde a este valor de altura atingida.
Escala Celsius
É a escala usada no Brasil e na maior parte dos países, oficializada em 1742 pelo astrônomo e físico sueco Anders Celsius (1701-1744). Esta escala tem como pontos de referência a temperatura de congelamento da água sob pressão normal (0 °C) e a temperatura de ebulição da água sob pressão normal (100 °C).
Escala Fahrenheit
Outra escala bastante utilizada, principalmente nos países de língua inglesa, criada em 1708 pelo físico alemão Daniel Gabriel Fahrenheit (1686-1736), tendo como referência a temperatura de uma mistura de gelo e cloreto de amônia (0 °F) e a temperatura do corpo humano (100 °F).
Em comparação com a escala Celsius:
0 °C = 32 °F
100 °C = 212 °F
Escala Kelvin
Também conhecida como escala absoluta, foi verificada pelo físico inglês William Thompson (1824-1907), também conhecido como Lorde Kelvin. Esta escala tem como referência a temperatura do menor estado de agitação de qualquer molécula (0 K) e é calculada apartir da escala Celsius.
Por convenção, não se usa "grau" para esta escala, ou seja 0 K, lê-se zero kelvin e não zero grau kelvin. Em comparação com a escala Celsius:
-273 °C = 0 K
0 °C = 273 K
100 °C = 373 K
Para que seja possível expressar temperaturas dadas em uma certa escala para outra qualquer deve-se estabelecer uma convenção geométrica de semelhança.
Por exemplo, convertendo uma temperatura qualquer dada em escala Fahrenheit para escala Celsius:
Pelo princípio de semelhança geométrica:

Exemplo:
Qual a temperatura correspondente em escala Celsius para a temperatura 100 °F?

Da mesma forma, pode-se estabelecer uma conversão Celsius-Fahrenheit:

E para escala Kelvin:
Algumas temperaturas:
| Escala Celsius (°C) | Escala Fahrenheit (°F) | Escala Kelvin (K) | |
|---|---|---|---|
Ar liquefeito
|
-39
|
-38,2
|
243
|
Maior Temperatura na superfície da Terra
|
58
|
136
|
331
|
Menor Tempertura na superfície da Terra
|
-89
|
-128
|
184
|
Ponto de combustão da madeira
|
250
|
482
|
523
|
Ponto de combustão do papel
|
184
|
363
|
257
|
Ponto de fusão do chumbo
|
327
|
620
|
600
|
Ponto de fusão do ferro
|
1535
|
2795
|
1808
|
Ponto do gelo
|
0
|
32
|
273,15
|
Ponto de solidificação do mercúrio
|
-39
|
-38,2
|
234
|
Ponto do vapor
|
100
|
212
|
373,15
|
Temperatura na chama do gás natural
|
660
|
1220
|
933
|
Temperatura na superfície do Sol
|
5530
|
10000
|
5800
|
Zero absoluto
|
-273,15
|
-459,67
|
0
|
Calor
Quando colocamos dois corpos com temperaturas diferentes em contato, podemos observar que a temperatura do corpo "mais quente" diminui, e a do corpo "mais frio" aumenta, até o momento em que ambos os corpos apresentem temperatura igual. Esta reação é causada pela passagem de energia térmica do corpo "mais quente" para o corpo "mais frio", a transferência de energia é o que chamamos calor.
Calor é a transferência de energia térmica entre corpos com temperaturas diferentes.
A unidade mais utilizada para o calor é caloria (cal), embora sua unidade no SI seja o joule (J). Uma caloria equivale a quantidade de calor necessária para aumentar a temperatura de um grama de água pura, sob pressão normal, de 14,5 °C para 15,5 °C.
A relação entre a caloria e o joule é dada por:
1 cal = 4,186J
Partindo daí, podem-se fazer conversões entre as unidades usando regra de três simples.
Como 1 caloria é uma unidade pequena, utilizamos muito o seu múltiplo, a quilocaloria.
1 kcal = 10³cal
Calor sensível
É denominado calor sensível, a quantidade de calor que tem como efeito apenas a alteração da temperatura de um corpo.
Este fenômeno é regido pela lei física conhecida como Equação Fundamental da Calorimetria, que diz que a quantidade de calor sensível (Q) é igual ao produto de sua massa, da variação da temperatura e de uma constante de proporcionalidade dependente da natureza de cada corpo denominada calor específico.
Assim:
Onde:
Q = quantidade de calor sensível (cal ou J).
c = calor específico da substância que constitui o corpo (cal/g°C ou J/kg°C).
m = massa do corpo (g ou kg).
Δθ = variação de temperatura (°C).
É interessante conhecer alguns valores de calores específicos:
Substância
|
c (cal/g°C)
|
|---|---|
Alumínio
|
0,219
|
Água
|
1,000
|
Álcool
|
0,590
|
Cobre
|
0,093
|
Chumbo
|
0,031
|
Estanho
|
0,055
|
Ferro
|
0,119
|
Gelo
|
0,550
|
Mercúrio
|
0,033
|
Ouro
|
0,031
|
Prata
|
0,056
|
Vapor d'água
|
0,480
|
Zinco
|
0,093
|
Quando:
Q>0: o corpo ganha calor.
Q<0: o corpo perde calor.
Exemplo:
Qual a quantidade de calor sensível necessária para aquecer uma barra de ferro de 2kg de 20°C para 200 °C? Dado: calor específico do ferro = 0,119cal/g°C.
2 kg = 2000 g
Nem toda a troca de calor existente na natureza se detém a modificar a temperatura dos corpos. Em alguns casos há mudança de estado físico destes corpos. Neste caso, chamamos a quantidade de calor calculada de calor latente.
A quantidade de calor latente (Q) é igual ao produto da massa do corpo (m) e de uma constante de proporcionalidade (L).
Assim:
A constante de proporcionalidade é chamada calor latente de mudança de fase e se refere a quantidade de calor que 1 g da substância calculada necessita para mudar de uma fase para outra.
Além de depender da natureza da substância, este valor numérico depende de cada mudança de estado físico.
Por exemplo, para a água:
Calor latente de fusão
|
80cal/g
| |
Calor latente de vaporização
|
540cal/g
| |
Calor latente de solidificação
|
-80cal/g
| |
Calor latente de condensação
|
-540cal/g
|
Quando:
Q>0: o corpo funde ou vaporiza.
Q<0: o corpo solidifica ou condensa.
Exemplo:
Qual a quantidade de calor necessária para que um litro de água vaporize? Dado: densidade da água=1g/cm³ e calor latente de vaporização da água = 540 cal/g.
Assim:
Curva de aquecimento
Ao estudarmos os valores de calor latente, observamos que estes não dependem da variação de temperatura. Assim podemos elaborar um gráfico de temperatura em função da quantidade de calor absorvida. Chamamos este gráfico de Curva de Aquecimento:
Para que o estudo de trocas de calor seja realizado com maior precisão, este é realizado dentro de um aparelho chamado calorímetro, que consiste em um recipiente fechado incapaz de trocar calor com o ambiente e com seu interior.
Dentro de um calorímetro, os corpos colocados trocam calor até atingir o equilíbrio térmico. Como os corpos não trocam calor com o calorímetro e nem com o meio em que se encontram, toda a energia térmica passa de um corpo ao outro.
Como, ao absorver calor Q>0 e ao transmitir calor Q<0, a soma de todas as energias térmicas é nula, ou seja:
ΣQ=0
(lê-se que somatório de todas as quantidades de calor é igual a zero)
Sendo que as quantidades de calor podem ser tanto sensível como latente.
Exemplo:
Qual a temperatura de equilíbrio entre uma bloco de alumínio de 200g à 20°C mergulhado em um litro de água à 80°C? Dados calor específico: água=1cal/g°C e alumínio = 0,219cal/g°C.
Repare que, neste exemplo, consideramos a massa da água como 1000g, pois temos 1 litro de água.
Capacidade térmica é a quantidade de calor que um corpo necessita receber ou ceder para que sua temperatura varie uma unidade.
Então, pode-se expressar esta relação por:

Sua unidade usual é cal/°C.
A capacidade térmica de 1g de água é de 1cal/°C já que seu calor específico é 1cal/g.°C
Transmissão
Em certas situações, mesmo não havendo o contato físico entre os corpos, é possível sentir que algo está mais quente. Como quando chega-se perto do fogo de uma lareira. Assim, concluímos que de alguma forma o calor emana desses corpos "mais quentes" podendo se propagar de diversas maneiras.
Como já vimos anteriormente, o fluxo de calor acontece no sentido da maior para a menor temperatura.
Este trânsito de energia térmica pode acontecer pelas seguintes maneiras:
- condução;
- convecção;
- irradiação.
Fluxo de Calor
Para que um corpo seja aquecido, normalmente, usa-se uma fonte térmica de potência constante, ou seja, uma fonte capaz de fornecer uma quantidade de calor por unidade de tempo.
Definimos fluxo de calor (Φ) que a fonte fornece de maneira constante como o quociente entre a quantidade de calor (Q) e o intervalo de tempo de exposição (Δt):
Sendo a unidade adotada para fluxo de calor, no sistema internacional, o Watt (W), que corresponde a Joule por segundo, embora também sejam muito usada a unidade caloria/segundo (cal/s) e seus múltiplos: caloria/minuto (cal/min) e quilocaloria/segundo (kcal/s).
Exemplo:
Uma fonte de potência constante igual a 100W é utilizada para aumentar a temperatura 100g de mercúrio 30°C. Sendo o calor específico do mercúrio 0,033cal/g.°C e 1cal=4,186J, quanto tempo a fonte demora para realizar este aquecimento?
Aplicando a equação do fluxo de calor:

Condução Térmica
É a situação em que o calor se propaga através de um "condutor". Ou seja, apesar de não estar em contato direto com a fonte de calor um corpo pode ser modificar sua energia térmica se houver condução de calor por outro corpo, ou por outra parte do mesmo corpo.
Por exemplo, enquanto cozinha-se algo, se deixarmos uma colher encostada na panela, que está sobre o fogo, depois de um tempo ela esquentará também.
Este fenômeno acontece, pois, ao aquecermos a panela, suas moléculas começam a agitar-se mais, como a panela está em contato com a colher, as moléculas em agitação maior provocam uma agitação nas moléculas da colher, causando aumento de sua energia térmica, logo, o aquecimento dela.
Também é por este motivo que, apesar de apenas a parte inferior da panela estar diretamente em contato com o fogo, sua parte superior também esquenta.
Convecção Térmica
A convecção consiste no movimento dos fluidos, e é o princípio fundamental da compreensão do vento, por exemplo.
O ar que está nas planícies é aquecido pelo sol e pelo solo, assim ficando mais leve e subindo. Então as massas de ar que estão nas montanhas, e que está mais frio que o das planícies, toma o lugar vago pelo ar aquecido, e a massa aquecida se desloca até os lugares mais altos, onde resfriam. Estes movimentos causam, entre outros fenômenos naturais, o vento.
Formalmente, convecção é o fenômeno no qual o calor se propaga por meio do movimento de massas fluidas de densidades diferentes.
Irradiação Térmica
É a propagação de energia térmica que não necessita de um meio material para acontecer, pois o calor se propaga através de ondas eletromagnéticas.
Imagine um forno microondas. Este aparelho aquece os alimentos sem haver contato com eles, e ao contrário do forno à gás, não é necessário que ele aqueça o ar. Enquanto o alimento é aquecido há uma emissão de microondas que fazem sua energia térmica aumentar, aumentando a temperatura.
O corpo que emite a energia radiante é chamado emissor ou radiador e o corpo que recebe, o receptor.
Gases são fluidos no estado gasoso. A característica que os difere dos fluidos líquidos é que, quando colocados em um recipiente, estes têm a capacidade de ocupá-lo totalmente. A maior parte dos elementos químicos não-metálicos conhecidos são encontrados no seu estado gasoso, em temperatura ambiente.
As moléculas do gás, ao se movimentarem, colidem com as outras moléculas e com as paredes do recipiente onde se encontram, exercendo uma pressão, chamada de pressão do gás.
Esta pressão tem relação com o volume do gás e à temperatura absoluta.
Ao ter a temperatura aumentada, as moléculas do gás aumentam sua agitação, provocando mais colisões.
Ao aumentar o volume do recipiente, as moléculas tem mais espaço para se deslocar, logo, as colisões diminuem, diminuindo a pressão.
Utilizando os princípios da mecânica Newtoniana é possível estabelecer a seguinte relação:
Onde:
p=pressão
m=massa do gás
v=velocidade média das moléculas
V=volume do gás.
Gás perfeito ou ideal
É considerado um gás perfeito quando são presentes as seguintes características:
- o movimento das moléculas é regido pelos princípios da mecânica Newtoniana;
- os choques entre as moléculas são perfeitamente elásticos, ou seja, a quantidade de movimento é conservada;
- não há atração e nem repulsão entre as moléculas;
- o volume de cada molécula é desprezível quando comparado com o volume total do gás.
Energia cinética de um gás
Devido às colisões entre si e com as paredes do recipiente, as moléculas mudam a sua velocidade e direção, ocasionando uma variação de energia cinética de cada uma delas. No entanto, a energia cinética média do gás permanece a mesma.
Novamente utilizando-se conceitos da mecânica Newtoniana estabelece-se:
Onde:
n=número molar do gás (nº de mols)
R=constante universal dos gases perfeitos (R=8,31J/mol.K)
T=temperatura absoluta (em Kelvin)
O número de mols do gás é calculado utilizando-se sua massa molar, encontrado em tabelas periódicas e através da constante de Avogadro.
Utilizando-se da relação que em 1mol de moléculas de uma substância há  moléculas desta substância.
moléculas desta substância.
A palavra isotérmica se refere à mesma temperatura. Logo, uma transformação isotérmica de um gás ocorre quando a temperatura inicial é conservada.
A lei física que expressa essa relação é conhecida com Lei de Boyle e é matematicamente expressa por:
Onde:
p=pressão
V=volume
Como esta constante é a mesma para um mesmo gás, ao ser transformado, é válida a relação:
Exemplo:
Certo gás contido em um recipiente de 1m³ com êmbolo exerce uma pressão de 250Pa. Ao ser comprimido isotérmicamente a um volume de 0,6m³ qual será a pressão exercida pelo gás?
Analogamente à transformação isotérmica, quando há uma transformação isobárica, a pressão é conservada.
Regida pela Lei de Charles e Gay-Lussac, esta transformação pode ser expressa por:
Onde:
V=volume;
T=temperatura absoluta;
Assim, quando um mesmo gás muda de temperatura ou volume, é válida a relação:
Exemplo:
Um gás de volume 0,5m³ à temperatura de 20ºC é aquecido até a temperatura de 70ºC. Qual será o volume ocupado por ele, se esta transformação acontecer sob pressão constante?
É importante lembrarmos que a temperatura considerada deve ser a temperatura absoluta do gás (escala Kelvin) assim, o primeiro passo para a resolução do exercício é a conversão de escalas termométricas:
Lembrando que:
Então:
A transformação isométrica também pode ser chamada isocórica e assim como nas outras transformações vistas, a isométrica se baseia em uma relação em que, para este caso, o volume se mantém.
Regida pela Lei de Charles, a transformação isométrica é matematicamente expressa por:
Onde:
p=pressão;
T=temperatura absoluta do gás;
Como para um mesmo gás, a constante  é sempre a mesma, garantindo a validade da relação:
é sempre a mesma, garantindo a validade da relação:
Exemplo:
Um gás que se encontra à temperatura de 200K é aquecido até 300K, sem mudar de volume. Se a pressão exercida no final do processo de aquecimento é 1000Pa, qual era a pressão inicial?
Relacionando as Leis de Boyle, Charles Gay-Lussac e de Charles é possível estabelecer uma equação que relacione as variáveis de estado: pressão (p), volume (V) e temperatura absoluta (T) de um gás.
Esta equação é chamada Equação de Clapeyron, em homenagem ao físico francês Paul Emile Clapeyron que foi quem a estabeleceu.
Onde:
p=pressão;
V=volume;
n=nº de mols do gás;
R=constante universal dos gases perfeitos;
T=temperatura absoluta.
Exemplo:
(1) Qual é o volume ocupado por um mol de gás perfeito submetido à pressão de 5000N/m², a uma temperatura igual a 50°C?
Dado: 1atm=100000N/m² e 
Substituindo os valores na equação de Clapeyron:
Através da equação de Clapeyron é possível obter uma lei que relaciona dois estados diferentes de uma transformação gasosa, desde que não haja variação na massa do gás.
Considerando um estado (1) e (2) onde:
Através da lei de Clapeyron:

Esta equação é chamada Lei geral dos gases perfeitos.
As partículas de um sistema têm vários tipos de energia, e a soma de todas elas é o que chamamos Energia interna de um sistema.
Para que este somatório seja calculado, são consideradas as energias cinéticas de agitação , potencial de agregação, de ligação e nuclear entre as partículas.
Nem todas estas energias consideradas são térmicas. Ao ser fornecida a um corpo energia térmica, provoca-se uma variação na energia interna deste corpo. Esta variação é no que se baseiam os princípios da termodinâmica.
Se o sistema em que a energia interna está sofrendo variação for um gás perfeito, a energia interna será resumida na energia de translação de suas partículas, sendo calculada através da Lei de Joule:
Onde:
U: energia interna do gás;
n: número de mol do gás;
R: constante universal dos gases perfeitos;
T: temperatura absoluta (kelvin).
Como, para determinada massa de gás, n e R são constantes, a variação da energia interna dependerá da variação da temperatura absoluta do gás, ou seja,
- Quando houver aumento da temperatura absoluta ocorrerá uma variação positiva da energia interna
 .
. - Quando houver diminuição da temperatura absoluta, há uma variação negativa de energia interna
 .
. - E quando não houver variação na temperatura do gás, a variação da energia interna será igual a zero
 .
.
Conhecendo a equação de Clepeyron, é possível compará-la a equação descrita na Lei de Joule, e assim obteremos:
Trabalho de um gás
Considere um gás de massa m contido em um cilindro com área de base A, provido de um êmbolo.
Ao ser fornecida uma quantidade de calor Qao sistema, este sofrerá uma expansão, sob pressão constante, como é garantido pela Lei de Gay-Lussac, e o êmbolo será deslocado.
Assim como para os sistemas mecânicos, o trabalho do sistema será dado pelo produto da força aplicada no êmbolo com o deslocamento do êmbolo no cilindro:
Assim, o trabalho realizado por um sistema, em uma tranformação com pressão constante, é dado pelo produto entre a pressão e a variação do volume do gás.
Quando:
- o volume aumenta no sistema, o trabalho é positivo, ou seja, é realizado sobre o meio em que se encontra (como por exemplo empurrando o êmbolo contra seu próprio peso);
- o volume diminui no sistema, o trabalho é negativo, ou seja, é necessário que o sistema receba um trabalho do meio externo;
- o volume não é alterado, não há realização de trabalho pelo sistema.
Exemplo:
(1) Um gás ideal de volume 12m³ sofre uma transformação, permenescendo sob pressão constante igual a 250Pa. Qual é o volume do gás quando o trabalho realizado por ele for 2kJ?
Diagrama p x V
É possível representar a tranformação isobárica de um gás através de um diagrama pressão por volume:
Comparando o diagrama à expressão do cálculo do trabalho realizado por um gás  , é possível verificar que o trabalho realizado é numericamente igual à area sob a curva do gráfico (em azul na figura).
, é possível verificar que o trabalho realizado é numericamente igual à area sob a curva do gráfico (em azul na figura).
Com esta verificação é possível encontrar o trabalho realizado por um gás com pressão variável durante sua tranformação, que é calculado usando esta conclusão, através de um método de nível acadêmico de cálculo integral, que consiste em uma aproximação dividindo toda a área sob o gráfico em pequenos retângulos e trapézios.
Chamamos de 1ª Lei da Termodinâmica o princípio da conservação de energia aplicada à termodinâmica, o que torna possível prever o comportamento de um sistema gasoso ao sofrer uma transformação termodinâmica.
Analisando o princípio da conservação de energia ao contexto da termodinâmica:
Um sistema não pode criar ou consumir energia, mas apenas armazená-la ou transferi-la ao meio onde se encontra, como trabalho, ou ambas as situações simultaneamente, então, ao receber uma quantidade Qde calor, esta poderá realizar um trabalho  e aumentar a energia interna do sistema ΔU, ou seja, expressando matematicamente:
e aumentar a energia interna do sistema ΔU, ou seja, expressando matematicamente:
Sendo todas as unidades medidas em Joule (J).
Conhecendo esta lei, podemos observar seu comportamento para cada uma das grandezas apresentadas:
Calor
|
Trabalho
|
Energia Interna
|
Q/
|
|---|---|---|---|
Recebe
|
Realiza
|
Aumenta
|
>0
|
Cede
|
Recebe
|
Diminui
|
<0
|
não troca
|
não realiza e nem recebe
|
não varia
|
=0
|
Exemplo:
(1) Ao receber uma quantidade de calor Q=50J, um gás realiza um trabalho igual a 12J, sabendo que a Energia interna do sistema antes de receber calor era U=100J, qual será esta energia após o recebimento?
Dentre as duas leis da termodinâmica, a segunda é a que tem maior aplicação na construção de máquinas e utilização na indústria, pois trata diretamente do rendimento das máquinas térmicas.
Dois enunciados, aparentemente diferentes ilustram a 2ª Lei da Termodinâmica, os enunciados de Clausius e Kelvin-Planck:
- Enunciado de Clausius:
O calor não pode fluir, de forma espontânea, de um corpo de temperatura menor, para um outro corpo de temperatura mais alta.
Tendo como consequência que o sentido natural do fluxo de calor é da temperatura mais alta para a mais baixa, e que para que o fluxo seja inverso é necessário que um agente externo realize um trabalho sobre este sistema.
- Enunciado de Kelvin-Planck:
É impossível a construção de uma máquina que, operando em um ciclo termodinâmico, converta toda a quantidade de calor recebido em trabalho.
Este enunciado implica que, não é possível que um dispositivo térmico tenha um rendimento de 100%, ou seja, por menor que seja, sempre há uma quantidade de calor que não se transforma em trabalho efetivo.
Maquinas térmicas
As máquinas térmicas foram os primeiros dispositivos mecânicos a serem utilizados em larga escala na indústria, por volta do século XVIII. Na forma mais primitiva, era usado o aquecimento para transformar água em vapor, capaz de movimentar um pistão, que por sua vez, movimentava um eixo que tornava a energia mecânica utilizável para as indústrias da época.
Chamamos máquina térmica o dispositivo que, utilizando duas fontes térmicas, faz com que a energia térmica se converta em energia mecânica (trabalho).
A fonte térmica fornece uma quantidade de calor  que no dispositivo transforma-se em trabalho
que no dispositivo transforma-se em trabalho mais uma quantidade de calor que não é capaz de ser utilizado como trabalho
mais uma quantidade de calor que não é capaz de ser utilizado como trabalho  .
.
Assim é válido que:
Utiliza-se o valor absolutos das quantidade de calor pois, em uma máquina que tem como objetivo o resfriamento, por exemplo, estes valores serão negativos.
Neste caso, o fluxo de calor acontece da temperatura menor para o a maior. Mas conforme a 2ª Lei da Termodinâmica, este fluxo não acontece espontaneamente, logo é necessário que haja um trabalho externo, assim:
Rendimento das máquinas térmicas
Podemos chamar de rendimento de uma máquina a relação entre a energia utilizada como forma de trabalho e a energia fornecida:
Considerando:
Mas como constatado:
logo, podemos expressar o rendimento como:

O valor mínimo para o rendimento é 0 se a máquina não realizar nenhum trabalho, e o máximo 1, se fosse possível que a máquina transformasse todo o calor recebido em trabalho, mas como visto, isto não é possível. Para sabermos este rendimento em percentual, multiplica-se o resultado obtido por 100%.
Exemplo:
Um motor à vapor realiza um trabalho de 12kJ quando lhe é fornecido uma quantidade de calor igual a 23kJ. Qual a capacidade percentual que o motor tem de transformar energia térmica em trabalho?
Até meados do século XIX, acreditava-se ser possível a construção de uma máquina térmica ideal, que seria capaz de transformar toda a energia fornecida em trabalho, obtendo um rendimento total (100%).
Para demonstrar que não seria possível, o engenheiro francês Nicolas Carnot (1796-1832) propôs uma máquina térmica teórica que se comportava como uma máquina de rendimento total, estabelecendo um ciclo de rendimento máximo, que mais tarde passou a ser chamado Ciclo de Carnot.
Este ciclo seria composto de quatro processos, independente da substância:
- Uma expansão isotérmica reversível. O sistema recebe uma quantidade de calor da fonte de aquecimento (L-M)
- Uma expansão adiabática reversível. O sistema não troca calor com as fontes térmicas (M-N)
- Uma compressão isotérmica reversível. O sistema cede calor para a fonte de resfriamento (N-O)
- Uma compressão adiabática reversível. O sistema não troca calor com as fontes térmicas (O-L)
Numa máquina de Carnot, a quantidade de calor que é fornecida pela fonte de aquecimento e a quantidade cedida à fonte de resfriamento são proporcionais às suas temperaturas absolutas, assim:
Assim, o rendimento de uma máquina de Carnot é:
Logo:
Sendo:
Com isto se conclui que para que haja 100% de rendimento, todo o calor vindo da fonte de aquecimento deverá ser transformado em trabalho, pois a temperatura absoluta da fonte de resfriamento deverá ser 0K.
Partindo daí conclui-se que o zero absoluto não é possível para um sistema físico.
Exemplo:
Qual o rendimento máximo teórico de uma máquina à vapor, cujo fluido entra a 560ºC e abandona o ciclo a 200ºC?
Assim como para os gases, um dos efeitos da variação da temperatura é a variação de dimensões em corpos sólidos e líquidos. Esta variação é o que chamamos Dilatação Térmica.
Aplica-se apenas para os corpos em estado sólido, e consiste na variação considerável de apenas uma dimensão. Como, por exemplo, em barras, cabos e fios.
Ao considerarmos uma barra homogênea, por exemplo, de comprimento  a uma temperatura inicial
a uma temperatura inicial  . Quando esta temperatura é aumentada até uma
. Quando esta temperatura é aumentada até uma  (>), observa-se que esta barra passa a ter um comprimento
(>), observa-se que esta barra passa a ter um comprimento  (>).
(>).
Com isso é possível concluir que a dilatação linear ocorre de maneira proporcional à variação de temperatura e ao comprimento inicial . Mas ao serem analisadas barras de dimensões iguais, mas feitas de um material diferente, sua variação de comprimento seria diferente, isto porque a dilatação também leva em consideração as propriedades do material com que o objeto é feito, este é a constante de proporcionalidade da expressão, chamada de coeficiente de dilatação linear (α).
Assim podemos expressar:
A unidade usada para α é o inverso da unidade de temperatura, como:  .
.
Alguns valores usuais de coeficientes de dilatação linear:
Substância
| |
Chumbo
| |
Zinco
| |
Alumínio
| |
Prata
| |
Cobre
| |
Ouro
| |
Ferro
| |
Platina
| |
Vidro (comum)
| |
Tungstênio
| |
Vidro (pyrex)
|
Lâmina bimetálica
Uma das aplicações da dilatação linear mais utilizadas no cotidiano é para a construção de lâminas bimetálicas, que consistem em duas placas de materiais diferentes, e portanto, coeficientes de dilatação linear diferentes, soldadas. Ao serem aquecidas, as placas aumentam seu comprimento de forma desigual, fazendo com que esta lâmina soldada entorte.
As lâminas bimetálicas são encontradas principalmente em dispositivos elétricos e eletrônicos, já que a corrente elétrica causa aquecimento dos condutores, que não podem sofrer um aquecimento maior do que foram construídos para suportar.
Quando é curvada a lâmina tem o objetivo de interromper a corrente elétrica, após um tempo em repouso a temperatura do condutor diminui, fazendo com que a lâmina volte ao seu formato inicial e reabilitando a passagem de eletricidade.
Representação gráfica
Podemos expressar a dilatação linear de um corpo através de um gráfico de seu comprimento (L) em função da temperatura (θ), desta forma:
O gráfico deve ser um segmento de reta que não passa pela origem, já que o comprimento inicial não é igual a zero.
Considerando um ângulo φ como a inclinação da reta em relação ao eixo horizontal. Podemos relacioná-lo com:
Pois:
Dilatação Superficial
Esta forma de dilatação consiste em um caso onde há dilatação linear em duas dimensões.
Considere, por exemplo, uma peça quadrada de lados  que é aquecida uma temperatura
que é aquecida uma temperatura  , de forma que esta sofra um aumento em suas dimensões, mas como há dilatação igual para os dois sentidos da peça, esta continua quadrada, mas passa a ter lados
, de forma que esta sofra um aumento em suas dimensões, mas como há dilatação igual para os dois sentidos da peça, esta continua quadrada, mas passa a ter lados  .
.
Podemos estabelecer que:
assim como:
E relacionando com cada lado podemos utilizar:
Para que possamos analisar as superfícies, podemos elevar toda a expressão ao quadrado, obtendo uma relação com suas áreas:
Mas a ordem de grandeza do coeficiente de dilatação linear (α) é  , o que ao ser elevado ao quadrado passa a ter grandeza
, o que ao ser elevado ao quadrado passa a ter grandeza  , sendo imensamente menor que α. Como a variação da temperatura (Δθ) dificilmente ultrapassa um valor de 10³ºC para corpos no estado sólido, podemos considerar o termo α²Δθ² desprezível em comparação com 2αΔθ, o que nos permite ignorá-lo durante o cálculo, assim:
, sendo imensamente menor que α. Como a variação da temperatura (Δθ) dificilmente ultrapassa um valor de 10³ºC para corpos no estado sólido, podemos considerar o termo α²Δθ² desprezível em comparação com 2αΔθ, o que nos permite ignorá-lo durante o cálculo, assim:
Mas, considerando-se:
Onde, β é o coeficiente de dilatação superficial de cada material, têm-se que:
Observe que esta equação é aplicável para qualquer superfície geométrica, desde que as áreas sejam obtidas através das relações geométricas para cada uma, em particular (circular, retangular, trapezoidal, etc.).
Exemplo:
(1) Uma lâmina de ferro tem dimensões 10m x 15m em temperatura normal. Ao ser aquecida 500ºC, qual será a área desta superfície? Dado 
Dilatação Volumétrica
Assim como na dilatação superficial, este é um caso da dilatação linear que acontece em três dimensões, portanto tem dedução análoga à anterior.
Consideremos um sólidos cúbico de lados que é aquecido uma temperatura , de forma que este sofra um aumento em suas dimensões, mas como há dilatação em três dimensões o sólido continua com o mesmo formato, passando a ter lados .
Inicialmente o volume do cubo é dado por:
Após haver aquecimento, este passa a ser:
Ao relacionarmos com a equação de dilatação linear:
Pelos mesmos motivos do caso da dilatação superficial, podemos desprezar 3α²Δθ² e α³Δθ³ quando comparados a 3αΔθ. Assim a relação pode ser dado por:
Podemos estabelecer que o coeficiente de dilatação volumétrica ou cúbica é dado por:
Assim:
Assim como para a dilatação superficial, esta equação pode ser utilizada para qualquer sólido, determinando seu volume conforme sua geometria.
Sendo β=2α e γ=3α, podemos estabelecer as seguintes relações:
Exemplo:
O cilindro circular de aço do desenho abaixo se encontra em um laboratório a uma temperatura de -100ºC. Quando este chegar à temperatura ambiente (20ºC), quanto ele terá dilatado? Dado que .
.
Sabendo que a área do cilindro é dada por:

Dilatação Volumétrica dos Líquidos
A dilatação dos líquidos tem algumas diferenças da dilatação dos sólidos, a começar pelos seus coeficientes de dilatação consideravelmente maiores e que para que o volume de um líquido seja medido, é necessário que este esteja no interior de um recipiente.
A lei que rege a dilatação de líquidos é fundamentalmente igual à dilatação volumétrica de sólidos, já que estes não podem dilatar-se linearmente e nem superficialmente, então:
Mas como o líquido precisa estar depositado em um recipiente sólido, é necessário que a dilatação deste também seja considerada, já que ocorre simultaneamente.
Assim, a dilatação real do líquido é a soma das dilatações aparente e do recipiente.
Para medir a dilatação aparente costuma-se utilizar um recipiente cheio até a borda. Ao aquecer este sistema (recipiente + líquido) ambos dilatarão e, como os líquidos costumam dilatar mais que os sólidos, uma quantidade do líquido será derramada, esta quantidade mede a dilatação aparente do líquido.
Assim:
Utilizando-se a expressão da dilatação volumétrica,  , e admitindo que os volumes iniciais do recipiente e do líquido são iguais, podemos expressar:
, e admitindo que os volumes iniciais do recipiente e do líquido são iguais, podemos expressar:
Ou seja, o coeficiente de dilatação real de um líquido é igual a soma de dilatação aparente com o coeficiente de dilatação do frasco onde este se encontra.
Exemplo:
(1) Um copo graduado de capacidade 10dm³ é preenchido com álcool etílico, ambos inicialmente à mesma temperatura, e são aquecidos em 100ºC. Qual foi a dilatação real do álcool?
Dados: 
Dilatação da água
Certamente você já deve ter visto, em desenhos animados ou documentários, pessoas pescando em buracos feitos no gelo. Mas como vimos, os líquidos sofrem dilatação da mesma forma que os sólidos, ou seja, de maneira uniforme, então como é possível que haja água em estado líquido sob as camadas de gelo com temperatura igual ou inferior a 0°C?
Este fenômeno ocorre devido ao que chamamos de dilatação anômala da água, pois em uma temperatura entre 0°C e 4°C há um fenômeno inverso ao natural e esperado. Neste intervalo de temperatura a água, ao ser resfriada, sofre uma expansão no seu volume, e ao ser aquecida, uma redução. É isto que permite a existência de vida dentro da água em lugares extremamente gelados, como o Pólo Norte.
A camada mais acima da água dos lagos, mares e rios se resfria devido ao ar gelado, aumentando sua massa específica e tornando-o mais pesado, então ocorre um processo de convecção até que toda a água atinja uma temperatura igual a 4°C, após isso o congelamento ocorre no sentido da superfície para o fundo.
Podemos representar o comportamento do volume da água em função da temperatura:
Como é possível perceber, o menor volume para a água acontece em 4°C.
Em termodinâmica, entropia é a medida de desordem das partículas em um sistema físico. Utiliza-se a letra S para representar esta grandeza.
Comparando este conceito ao cotidiano, podemos pensar que, uma pessoa ao iniciar uma atividade tem seus objetos organizados, e a medida que ela vai os utilizando e desenvolvendo suas atividades, seus objetos tendem a ficar cada vez mais desorganizados.
Voltando ao contexto das partículas, como sabemos, ao sofrem mudança de temperatura, os corpos alteram o estado de agitação de suas moléculas. Então ao considerarmos esta agitação como a desordem do sistema, podemos concluir que:
- quando um sistema recebe calor Q>0, sua entropia aumenta;
- quando um sistema cede calor Q<0, sua entropia diminui;
- se o sistema não troca calor Q=0, sua entropia permanece constante.
Segundo Rudolf Clausius, que utilizou a idéia de entropia pela primeira vez em 1865, para o estudo da entropia como grandeza física é mais útil conhecer sua variação do que seu valor absoluto. Assim, Clausis definiu que a variação de entropia (ΔS) em um sistema como:
Para processos onde as temperaturas absolutas (T) são constantes.
Para o caso onde a temperatura absoluta se altera durante este processo, o cálculo da variação de entropia envolve cálculo integral, sendo que sua resolução é dada por:
Observando a natureza como um sistema, podemos dizer que o Universo está constantemente recebendo energia, mas não tem capacidade de cedê-la, concluindo então que a entropia do Universo está aumentando com o passar do tempo.
Gelo derretendo é um exemplo conhecido de aumento de entropia




Óptica - Fundamentos
Luz - Comportamento e princípios
A luz, ou luz visível como é fisicamente caracterizada, é uma forma de energia radiante. É o agente físico que, atuando nos órgãos visuais, produz a sensação da visão.
Para saber mais...
Energia radiante é aquela que se propaga na forma de ondas eletromagnéticas, dentre as quais se pode destacar as ondas de rádio, TV, micro-ondas, raios X, raios gama, radar, raios infravermelho, radiação ultravioleta e luz visível.
Uma das características das ondas eletromagnéticas é a sua velocidade de propagação, que no vácuo tem o valor de aproximadamente 300 mil quilômetros por segundo, ou seja:
Podendo ter este valor reduzido em meios diferentes do vácuo, sendo a menor velocidade até hoje medida para tais ondas quando atravessam um composto chamado condensado de Bose-Einstein, comprovada em uma experiência recente.
|
A luz que percebemos tem como característica sua frequência que vai da faixa de  (vermelho) até
(vermelho) até  (violeta). Esta faixa é a de maior emissão do Sol, por isso os órgãos visuais de todos os seres vivos estão adaptados a ela, e não podem ver além desta, como por exemplo, a radiação ultravioleta e infravermelha.
(violeta). Esta faixa é a de maior emissão do Sol, por isso os órgãos visuais de todos os seres vivos estão adaptados a ela, e não podem ver além desta, como por exemplo, a radiação ultravioleta e infravermelha.
Divisões da Óptica
Óptica Física: estuda os fenômenos ópticos que exigem uma teoria sobre a natureza das ondas eletromagnéticas.
Óptica Geométrica: estuda os fenômenos ópticos em que apresentam interesse as trajetórias seguidas pela luz. Fundamenta-se na noção de raio de luz e nas leis que regulamentam seu comportamento. O estudo em nível de Ensino Médio restringe-se apenas a esta parte da óptica.
Conceitos básicos
Raios de luz
São a representação geométrica da trajetória da luz, indicando sua direção e o sentido da sua propagação. Por exemplo, em uma fonte puntiforme são emitidos infinitos raios de luz, embora apenas alguns deles cheguem a um observador.
Representa-se um raio de luz por um segmento de reta orientado no sentido da propagação.
Feixe de luz
É um conjunto de infinitos raios de luz; um feixe luminoso pode ser:
- Cônico convergente: os raios de luz convergem para um ponto;
- Cônico divergente: os raios de luz divergem a partir de um ponto;
- Cilíndrico paralelo: os raios de luz são paralelos entre si.
Fontes de luz
Tudo o que pode ser detectado por nossos olhos, e por outros instrumentos de fixação de imagens como câmeras fotográficas, é a luz de corpos luminosos que é refletida de forma difusa pelos corpos que nos cercam.
Fonte de luz são todos os corpos dos quais se podem receber luz, podendo ser fontes primárias ou secundárias.
- Fontes primárias: Também chamadas de corpos luminosos, são corpos que emitem luz própria, como por exemplo, o Sol, as estrelas, a chama de uma vela, uma lâmpada acesa,...
- Fontes secundárias: Também chamadas de corpos iluminados, são os corpos que enviam a luz que recebem de outras fontes, como por exemplo, a Lua, os planetas, as nuvens, os objetos visíveis que não têm luz própria,...
Quanto às suas dimensões, uma fonte pode ser classificada como:
- Pontual ou puntiforme: uma fonte sem dimensões consideráveis que emite infinitos raios de luz.
- Extensa: uma fonte com dimensões consideráveis em relação ao ambiente.
Continua após a publicidade
Meios de propagação da luz
Os diferentes meios materiais comportam-se de forma diferente ao serem atravessados pelos raios de luz, por isso são classificados em:
Meio transparente
É um meio óptico que permite a propagação regular da luz, ou seja, o observador vê um objeto com nitidez através do meio. Exemplos: ar, vidro comum, papel celofane, etc...
Meio translúcido
É um meio óptico que permite apenas uma propagação irregular da luz, ou seja, o observador vê o objeto através do meio, mas sem nitidez.
Meio opaco
É um meio óptico que não permite que a luz se propague, ou seja, não é possivel ver um objeto através do meio.
Fenômenos ópticos
Ao incidir sobre uma superfície que separa dois meios de propagação, a luz sofre algum, ou mais do que um, dos fenômenos a seguir:
Reflexão regular
A luz que incide na superfície e retorna ao mesmo meio, regularmente, ou seja, os raios incidentes e refletidos são paralelos. Ocorre em superfícies metálicas bem polidas, como espelhos.
Reflexão difusa
A luz que incide sobre a superfície volta ao mesmo meio, de forma irregular, ou seja, os raios incidentes são paralelos, mas os refletidos são irregulares. Ocorre em superfícies rugosas, e é responsável pela visibilidade dos objetos.
Refração
A luz incide e atravessa a superfície, continuando a se propagar no outro meio. Ambos os raios (incidentes e refratados) são paralelos, no entanto, os raios refratados seguem uma trajetória inclinada em relação aos incididos. Ocorre quando a superfície separa dois meios transparentes.
Absorção
A luz incide na superfície, no entanto não é refletida e nem refratada, sendo absorvida pelo corpo, e aquecendo-o. Ocorre em corpos de superfície escura.
Princípio da independência dos raios de luz
Quando os raios de luz se cruzam, estes seguem independentemente, cada um a sua trajetória.
Princípio da propagação retilínea da luz
Todo o raio de luz percorre trajetórias retilíneas em meios transparentes e homogêneos.
Para saber mais...
Um meio homogêneo é aquele que apresenta as mesmas características em todos os elementos de volume.
Um meio isótropo, ou isotrópico, é aquele em que a velocidade de propagação da luz e as demais propriedades ópticas independem da direção em que é realizada a medida.
Um meio ordinário é aquele que é, ao mesmo tempo, transparente, homogêneo e isótropo, como por exemplo, o vácuo.
|
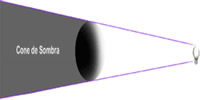
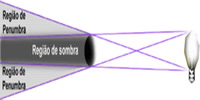
Quando um corpo opaco é colocado entre uma fonte de luz e um anteparo, é possível delimitar regiões de sombra e penumbra.
A sombra é a região do espaço que não recebe luz direta da fonte. Penumbra é a região do espaço que recebe apenas parte da luz direta da fonte, sendo encontrada apenas quando o corpo opaco é posto sob influência de uma fonte extensa. Ou seja:
- Fonte de luz puntiforme
- Fonte de luz extensa
Uma câmara escura de orifício consiste em um equipamento formado por uma caixa de paredes totalmente opacas, sendo que no meio de uma das faces existe um pequeno orifício.
Ao colocar-se um objeto, de tamanho o, de frente para o orifício, a uma distância p, nota-se que uma imagem refletida, de tamanho i, aparece na face oposta da caixa, a uma distância p', mas de foma invertida. Conforme ilustra a figura:
Desta forma, a partir de uma semelhança geométrica pode-se expressar a seguinte equação:
Esta é conhecida como a equação da câmara escura.
Reflexão é o fenômeno que consiste no fato de a luz voltar a se propagar no meio de origem, após incidir sobre uma superfície de separação entre dois meios.
Refração é o fenômeno que consiste no fato de a luz passar de um meio para outro diferente.
Durente uma reflexão são conservadas a frequência e a velocidade de propagação, enquanto durante a refração, apenas a frequência é mantida constante.
Reflexão e refração regular
Acontece quando, por exemplo, um feixe cilíndrico de luz atinge uma superfície totalmente lisa, ou tranquila, desta forma, os feixes refletidos e refratados também serão cilíndricos, logo os raios de luz serão paralelos entre si.
Reflexão e refração difusa
Acontece quando, por exemplo, um feixe cilíndrico de luz atinge uma superfície rugosa, ou agitada, fazendo com que os raios de luz refletidos e refratados tenham direção aleatória por todo o espaço.
Reflexão e refração seletiva
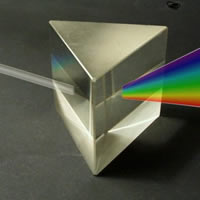
A luz branca que recebemos do sol, ou de lâmpadas fluorescentes, por exemplo, é policromática, ou seja, é formada por mais de uma luz monocromática, no caso do sol, as sete do arco-íris: vermelho, alaranjado, amarelo, verde, azul, anil e violeta.
Sendo assim, um objeto ao ser iluminado por luz branca "seleciona" no espectro solar as cores que vemos, e as refletem de forma difusa, sendo assim, vistas por nós.
Se um corpo é visto branco, é porque ele reflete todas as cores do espectro solar.
Se um corpo é visto vermelho, por exemplo, ele absorve todas as outras cores do espectro, refletindo apenas o vermelho.
Se um corpo é "visto" negro, é por que ele absorve todas as cores do espectro solar.
Chama-se filtro de luz a peça, normalmente acrílica, que deixa passar apenas um das cores do espectro solar, ou seja, um filtro vermelho, faz com que a única cor refratada de forma seletiva seja a vermelha.
Para saber mais...
É muito comum o uso de filtros de luz na astronomia para observar estrelas, já que estas apresentam diferentes cores, conforme sua temperatura e distância da Terra, principalmente.
|
Chama-se ponto objeto, relativamente a um sistema óptico, o vértice do feixe de luz que incide sobre um objeto ou uma superfície, sendo dividido em três tipos principais:
- Ponto objeto real (POR): é o vértice de um feixe de luz divergente, sendo formado pelo cruzamento efetivo dos raios de luz.
- Ponto objeto virtual (POV): é o vértice de um feixe de luz convergente, sendo formado pelo cruzamento imaginário do prolongamente dos raios de luz.
- Ponto objeto impróprio (POI): é o vértice de um feixe de luz cilíndrico, ou seja, se situa no infinito.
Chama-se ponto imagem, relativamente a um sistema óptico, o vértice de um feixe de luz emergente, ou seja, após ser incidido.
- Ponto imagem real (PIR): é o vértice de um feixe de luz emergente convergente, sendo formado pelo cruzamento efeitivo dos raios de luz.
- Ponto imagem virtual (PIV): é o vértice de um feixe de luz emergente divergente, sendo formado pelo cruzamento imaginário do prolongamento dos raios de luz.
- Ponto imagem impróprio (PII): é o vértice de um feixe de luz emergente cilíndrico, ou seja, se situa no infinito.
Há dois principais tipos de sistemas ópticos: os refletores e os refratores.
O grupo dos sistemas ópticos refletores consiste principalmente nos espelhos, que são superfícies de um corpo opaco, altamente polidas e com alto poder de reflexão.

No grupo dos sistemas ópticos refratores encontram-se os dioptros, que são peças constituídas de dois meios transparentes separados por uma superfície regular. Quando associados de forma conveniente os dioptros funcionam como utensílios ópticos de grande utilidade como lentes e prismas.
Sistemas ópticos estigmáticos, aplanéticos e ortoscópicos
- Um sistema óptico é estigmático quando cada ponto objeto conjuga apenas um ponto imagem.
- Um sistema óptico é aplanético quando um objeto plano e frontal também conjuga uma imagem plana e frontal.
- Um sistema óptico é ortoscópico quando uma imagem é conjugada semelhante a um objeto.
O único sistema óptico estigmático, aplanético e ortoscópico para qualquer posição do objeto é o espelho plano.
Reflexão é o fenômeno que consiste no fato de a luz voltar a se propagar no meio de origem, após incidir sobre um objeto ou superfície.
É possível esquematizar a reflexão de um raio de luz, ao atingir uma superfície polida, da seguinte forma:
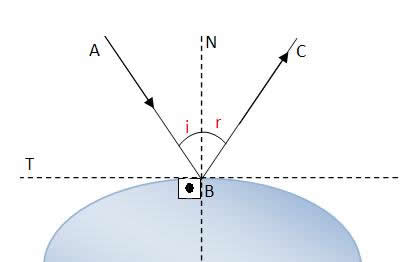
AB = raio de luz incidente
BC = raio de luz refletido
N = reta normal à superfície no ponto B
T = reta tangente à superfície no ponto B
i = ângulo de incidência, formado entre o raio incidente e a reta normal.
r = ângulo refletido, formado entre o raio refletido e a reta normal.
|
Leis da reflexão
Os fenômenos em que acontecem reflexão, tanto regular quanto difusa e seletiva, obedecem a duas leis fundamentais que são:
1ª lei da reflexão
O raio de luz refletido e o raio de luz incidente, assim como a reta normal à superfície, pertencem ao mesmo plano, ou seja, são coplanares.
2ª Lei da reflexão
O ângulo de reflexão (r) é sempre igual ao ângulo de incidência (i).
Um espelho plano é aquele em que a superfície de reflexão é totalmente plana.
Os espelhos planos têm utilidades bastante diversificadas, desde as domésticas até como componentes de sofisticados instrumentos ópticos.
Representa-se um espelho plano por:
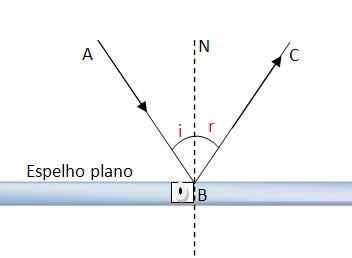
As principais propriedades de um espelho plano são a simetria entre os pontos objeto e imagem e que a maior parte da reflexão que acontece é regular.
Para saber mais...
Os espelhos geralmente são feitos de uma superfície metálica bem polida. É comum usar-se uma placa de vidro, onde se deposita uma fina camada de prata ou alumínio em uma das faces, tornando a outra um espelho.
|
Construção das imagens em um espelho plano
Para se determinar a imagem em um espelho plano, basta imaginarmos que o observador vê um objeto que parece estar atrás do espelho. Isto ocorre porque o prolongamento do raio refletido passa por um ponto imagem virtual (PIV), "atrás" do espelho.
Nos espelhos planos, o objeto e a respectiva imagem têm sempre naturezas opostas, ou seja, quando um é real o outro deve ser virtual. Portanto, para se obter geometricamente a imagem de um objeto pontual, basta traçar por ele, através do espelho, uma reta e marcar simétricamente o ponto imagem.
Translação de um espelho plano
Considerando a figura:
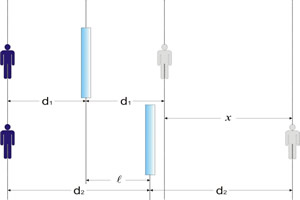
A parte superior do desenho mostra uma pessoa a uma distância  do espelho, logo a imagem aparece a uma distância em relação ao espelho.
do espelho, logo a imagem aparece a uma distância em relação ao espelho.
Na parte inferior da figura, o espelho é transladado  para a direita, fazendo com que o observador esteja a uma distância
para a direita, fazendo com que o observador esteja a uma distância  do espelho, fazendo com que a imagem seja deslocada x para a direita.
do espelho, fazendo com que a imagem seja deslocada x para a direita.
Pelo desenho podemos ver que:
Que pode ser reescrito como:
Mas pela figura, podemos ver que:
Logo:
Assim pode-se concluir que sempre que um espelho é transladado paralelamente a si mesmo, a imagem de um objeto fixo sofre translação no mesmo sentido do espelho, mas com comprimento equivalente ao dobro do comprimento da translação do espelho.
Se utilizarmos esta equação, e medirmos a sua taxa de variação em um intervalo de tempo, podemos escrever a velocidade de translação do espelho e da imagem da seguinta forma:

Ou seja, a velocidade de deslocamento da imagem é igual ao dobro da velocidade de deslocamento do espelho.
Quando o observador também se desloca, a velocidade ao ser considerada é a a velocidade relativa entre o observador e o espelho, ao invés da velocidade de translação do espelho, ou seja:
Associação de dois espelhos planos
Dois espelhos planos podem ser associados, com as superfícies refletoras se defrontando e formando um ângulo  entre si, com valores entre 0° e 180°.
entre si, com valores entre 0° e 180°.
Por razões de simetria, o ponto objeto e os pontos imagem ficam situados sobre uma circunferência.
Para se calcular o número de imagens que serão vistas na associação usa-se a fórmula:
Sendo o ângulo formado entre os espelhos.
Por exemplo, quando os espelhos encontra-se perpendicularmente, ou seja =90°:

Portanto, nesta configuração são vistas 3 pontos imagem.
Chamamos espelho esférico qualquer calota esférica que seja polida e possua alto poder de reflexão.

É fácil observar-se que a esfera da qual a calota acima faz parte tem duas faces, uma interna e outra externa. Quando a superfície refletiva considerada for a interna, o espelho é chamado côncavo. Já nos casos onde a face refletiva é a externa, o espelho é chamado convexo.
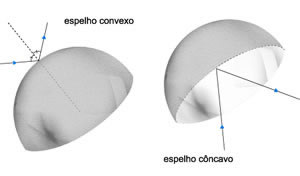
Reflexão da luz em espelhos esféricos
Assim como para espelhos planos, as duas leis da reflexão também são obedecidas nos espelhos esféricos, ou seja, os ângulos de incidência e reflexão são iguais, e os raios incididos, refletidos e a reta normal ao ponto incidido.
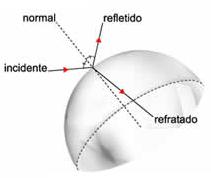
Aspectos geométricos dos espelhos esféricos
Para o estudo dos espelhos esféricos é útil o conhecimento dos elementos que os compõe, esquematizados na figura abaixo:
- C é o centro da esfera;
- V é o vértice da calota;
- O eixo que passa pelo centro e pelo vértice da calota é chamado eixo principal.
- As demais retas que cruzam o centro da esfera são chamadas eixos secundários.
- O ângulo
 , que mede a distância angular entre os dois eixos secundários que cruzam os dois pontos mais externos da calota, é a abertura do espelho.
, que mede a distância angular entre os dois eixos secundários que cruzam os dois pontos mais externos da calota, é a abertura do espelho. - O raio da esfera R que origina a calota é chamado raios de curvatura do espelho.
Um sistema óptico que consegue conjugar a um ponto objeto, um único ponto como imagem é dito estigmático. Os espelhos esféricos normalmente não são estigmáticos, nem aplanéticos ou ortoscópicos, como os espelhos planos.
No entanto, espelhos esféricos só são estigmáticos para os raios que incidem próximos do seu vértice V e com uma pequena inclinação em relação ao eixo principal. Um espelho com essas propriedades é conhecido como espelho de Gauss.
Um espelho que não satisfaz as condições de Gauss (incidência próxima do vértice e pequena inclinação em relação ao eixo principal) é dito astigmático. Um espelho astigmático conjuga a um ponto uma imagem parecendo uma mancha.
Focos dos espelhos esféricos
Para os espelhos côncavos de Gauss, pode-se verificar que todos os raios luminosos que incidirem ao longo de uma direção paralela ao eixo secundário passam por (ou convergem para) um mesmo ponto F - o foco principal do espelho.
No caso dos espelhos convexos, a continuação do raio refletido é que passa pelo foco. Tudo se passa como se os raios refletidos se originassem do foco.
Exemplo clássico de espelhos convexos são os retrovisores dos carros
Exemplo clássico de espelhos côncavos são as lentes de aumento
Determinação de imagens
Analisando objetos diante de um espelho esférico, em posição perpendicular ao eixo principal do espelho podemos chegar a algumas conclusões importantes.
Um objeto pode ser real ou virtual. No caso dos espelhos, dizemos que o objeto é virtual se ele se encontra “atrás” do espelho. No caso de espelhos esféricos a imagem de um objeto pode ser maior, menor ou igual ao tamanho do objeto. A imagem pode ainda aparecer invertida em relação ao objeto. Se não houver sua inversão dizemos que ela é direita.
Equação fundamental dos espelhos esféricos
Dadas a distância focal e posição do objeto, é possível determinar analiticamente a posição da imagem através da equação de Gauss, que é expressa por:
No intervalo do espectro eletromagnético que corresponde à luz visível, cada frequência equivale à sensação de uma cor.
Conforme a frequência aumenta, diminui o comprimento de onda, assim como mostra a tabela e o trecho do espectroeletromagnético abaixo.
Cor |
Comprimento de onda
( |
Frequência
( |
Violeta
|
3900 – 4500
|
7,69 – 6,65
|
Anil
|
4500 – 4550
|
5,65 – 6,59
|
Azul
|
4550 – 4920
|
6,59 – 6,10
|
Verde
|
4920 – 5770
|
6,10 – 5,20
|
Amarelo
|
5770 – 5970
|
5,20 – 5,03
|
Alaranjado
|
5970 – 5220
|
5,03 – 4,82
|
Vermelho
|
6220 – 7800
|
4,82 – 3,84
|
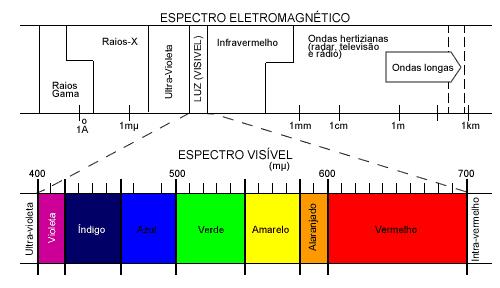
Quando recebemos raios de luz de diferentes frequências podemos perceber cores diferentes destas, como combinações. A luz branca que percebemos vinda do Sol, por exemplo, é a combinação de todas as sete cores do espectro visível.
De acordo com sua cor, a luz pode ser classficada como monocromática ou policromática.
Chama-se luz monocromática aquela composta de apenas uma cor, como por exemplo a luz amarela emitida por lâmpadas de sódio.
Chama-se luz policromática aquela composta por uma combinação de duas ou mais cores monocromáticas, como por exemplo a luz branca emitida pelo sol ou por lâmpadas comuns.
Usando-se um prisma, é possível decompor a luz policromática nas luzes monocromáticas que a formam, o que não é possível para as cores monocromáticas, como o vermelho, alaranjado, amarelo, verde, azul, anil e violeta.
Um exemplo da composição das cores monocromáticas que formam a luz branca é o disco de Newton, que é uma experiência composta de um disco com as sete cores do espectro visível, que ao girar em alta velocidade, "recompõe" as cores monocromáticas, formando a cor policromática branca.
Cor de um corpo
Ao nosso redor é possível distinguir várias cores, mesmo quando estamos sob a luz do Sol, que é branca.
Esse fenômeno acontece pois quando é incidida luz branca sobre um corpo de cor verde, por exemplo, este absorve todas as outras cores do espectro visível, refletido de forma difusa apenas o verde, o que torna possível distinguir sua cor.
Por isso, um corpo de cor branca é aquele que reflete todas as cores, sem absorver nenhuma, enquanto um corpo de cor preta absorve todas as cores sobre ele incididas, sem refletir nenhuma, o que causa aquecimento.
Há muito tempo sabe-se que a luz faz parte de um grupo de ondas, chamado de ondas eletromagnéticas, sendo uma das características que reune este grupo a sua velocidade de propagação.
A velocidade da luz no vácuo, mas que na verdade se aplica a diversos outros fenômenos eletromagnéticos como raios-x, raios gama, ondas de rádio e tv, é caracterizada pela letra c, e tem um valor aproximado de 300 mil quilômetros por segundo, ou seja:
No entanto, nos meios materiais, a luz se comporta de forma diferente, já que interage com a matéria existente no meio. Em qualquer um destes meios a velocidade da luz v é menor que c.
Em meios diferentes do vácuo também diminui a velocidade conforme aumenta a frequência. Assim a velocidade da luz vermelha é maior que a velocidade da luz violeta, por exemplo.
Índice de refração absoluto
Para o entendimento completo da refração convém a introdução de uma nova grandeza que relacione a velocidade da radiação monocromática no vácuo e em meios materiais, esta grandeza é o índice de refração da luz monocromática no meio apresentado, e é expressa por:
Onde n é o índice de refração absoluto no meio, sendo uma grandeza adimensional.
É importante observar que o índice de refração absoluto nunca pode ser menor do que 1, já que a maior velocidade possível em um meio é c, se o meio considerado for o próprio vácuo.
Para todos os outros meios materiais n é sempre maior que 1.
Alguns índices de refração usuais:
Material
|
n
|
Ar seco (0°C, 1atm)
|
≈ 1 (1,000292)
|
Gás carbônico (0°C, 1atm)
|
≈ 1 (1,00045)
|
Gelo (-8°C)
|
1,310
|
Água (20°C)
|
1,333
|
Etanol (20°C)
|
1,362
|
Tetracloreto de carbono
|
1,466
|
Glicerina
|
1,470
|
Monoclorobenzeno
|
1,527
|
Vidros
|
de 1,4 a 1,7
|
Diamante
|
2,417
|
Sulfeto de antimônio
|
2,7
|
Índice de refração relativo entre dois meios
Chama-se índice de refração relativo entre dois meios, a relação entre os índices de refração absolutos de cada um dos meios, de modo que:
Mas como visto:
Então podemos escrever:

Ou seja:
Observe que o índice de refração relativo entre dois meios pode ter qualquer valor positivo, inclusive menores ou iguais a 1.
Refringência
Dizemos que um meio é mais refringente que outro quando seu índice de refração é maior que do outro. Ou seja, o etanol é mais refringente que a água.
De outra maneira, podemos dizer que um meio é mais refringente que outro quando a luz se propaga por ele com velocidade menor que no outro.
Chamamos de refração da luz o fenômeno em que ela é transmitida de um meio para outro diferente.
Nesta mudança de meios a frequência da onda luminosa não é alterada, embora sua velocidade e o seu comprimento de onda sejam.
Com a alteração da velocidade de propagação ocorre um desvio da direção original.
Para se entender melhor este fenômeno, imagine um raio de luz que passa de um meio para outro de superfície plana, conforme mostra a figura abaixo:
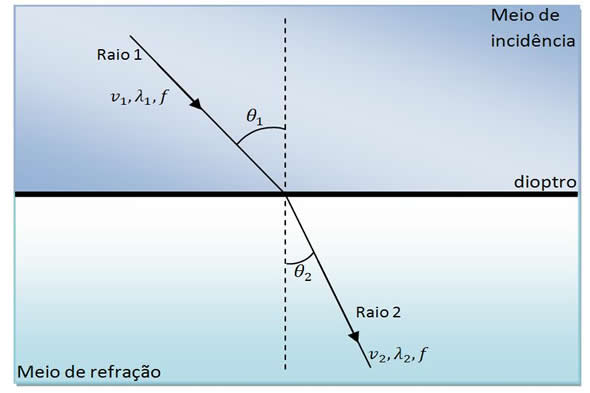
Onde:
- Raio 1 é o raio incidente, com velocidade e comprimento de onda característico;
- Raio 2 é o raio refratado, com velocidade e comprimento de onda característico;
- A reta tracejada é a linha normal à superfície;
- O ângulo formado entre o raio 1 e a reta normal é o ângulo de incidência;
- O ângulo formado entre o raio 2 e a reta normal é o ângulo de refração;
- A fronteira entre os dois meios é um dioptro plano.
Conhecendo os elementos de uma refração podemos entender o fenômeno através das duas leis que o regem.
1ª Lei da Refração
A 1ª lei da refração diz que o raio incidente (raio 1), o raio refratado (raio 2) e a reta normal ao ponto de incidência (reta tracejada) estão contidos no mesmo plano, que no caso do desenho acima é o plano da tela.
2ª Lei da Refração - Lei de Snell
A 2ª lei da refração é utilizada para calcular o desvio dos raios de luz ao mudarem de meio, e é expressa por:
No entanto, sabemos que:
Além de que:
Ao agruparmos estas informações, chegamos a uma forma completa da Lei de Snell:
Dioptro
É todo o sistema formado por dois meios homogêneos e transparentes.
Quando esta separação acontece em um meio plano, chamamos então, dioptro plano.
A figura abaixo representa um dioptro plano, na separação entre a água e o ar, que são dois meios homogêneos e transparentes.
Formação de imagens através de um dioptro
Considere um pescador que vê um peixe em um lago. O peixe encontra-se a uma profundidade H da superfície da água. O pescador o vê a uma profundidade h. Conforme mostra a figura abaixo:
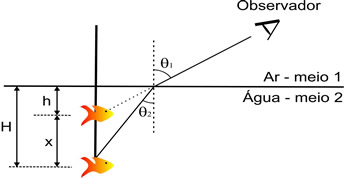
A fórmula que determina estas distância é:
Prisma
Um prisma é um sólido geométrico formado por uma face superior e uma face inferior paralelas e congruentes (também chamadas de bases) ligadas por arestas. As laterais de um prisma são paralelogramos.
No entanto, para o contexto da óptica, é chamado prisma o elemento óptico transparente com superfícies retas e polidas que é capaz de refratar a luz nele incidida. O formato mais usual de um prisma óptico é o de pirâmide com base quadrangular e lados triangulares.
A aplicação usual dos prismas ópticos é seu uso para separar a luz branca policromática nas sete cores monocromáticas do espectro visível, além de que, em algumas situações poder refletir tais luzes.
Funcionamento do prisma
Quando a luz branca incide sobre a superfície do prisma, sua velocidade é alterada, no entanto, cada cor da luz branca tem um índice de refração diferente, e logo ângulos de refração diferentes, chegando à outra extremidade do prisma separadas.
Tipos de prismas
- Prismas dispersivos são usados para separar a luz em suas cores de espectro.
- Prismas refletivos são usados para refletir a luz.
- Prismas polarizados podem dividir o feixe de luz em componentes de variadas polaridades.
Em uma lente esférica com comportamento convergente, a luz que incide paralelamente entre si é refratada, tomando direções que convergem a um único ponto.
Tanto lentes de bordas finas como de bordas espessas podem ser convergentes, dependendo do seu índice de refração em relação ao do meio externo.
O caso mais comum é o que a lente tem índice de refração maior que o índice de refração do meio externo. Nesse caso, um exemplo de lente com comportamento convergente é o de uma lente biconvexa (com bordas finas):
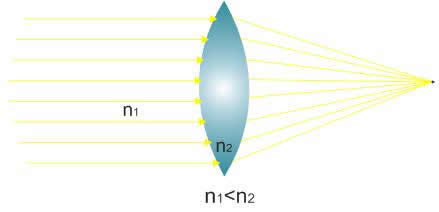
Já o caso menos comum ocorre quando a lente tem menor índice de refração que o meio. Nesse caso, um exempo de lente com comportamento convergente é o de uma lente bicôncava (com bordas espessas):
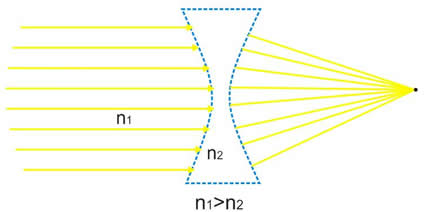
Em uma lente esférica com comportamento divergente, a luz que incide paralelamente entre si é refratada, tomando direções que divergem a partir de um único ponto.
Tanto lentes de bordas espessas como de bordas finas podem ser divergentes, dependendo do seu índice de refração em relação ao do meio externo.
O caso mais comum é o que a lente tem índice de refração maior que o índice de refração do meio externo. Nesse caso, um exemplo de lente com comportamento divergente é o de uma lente bicôncava (com bordas espessas):
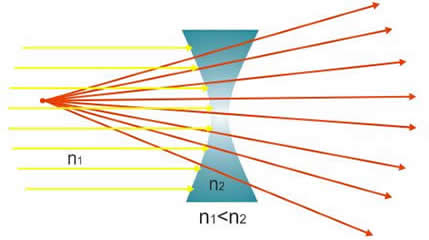
Já o caso menos comum ocorre quando a lente tem menor índice de refração que o meio. Nesse caso, um exempo de lente com comportamento divergente é o de uma lente biconvexa (com bordas finas):
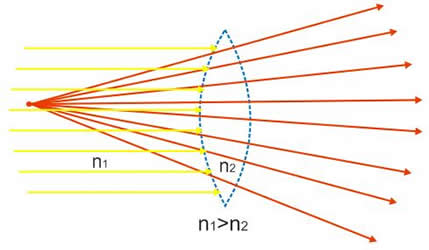
Vergência
Focos de uma lente
Focos principais
Uma lente possui um par de focos principais: foco principal objeto (F) e foco principal imagem (F'). Ambos localizam-se a sobre o eixo principal e são simétricos em relação à lente, ou seja, a distância OF é igual a distância OF'.
Foco imagem (F')
É o ponto ocupado pelo foco imagem, podendo ser real ou virtual.
Foco objeto (F)
É o ponto ocupado pelo foco objeto, podendo ser real ou virtual.
Distância focal
É a medida da distância entre um dos focos principais e o centro óptico, esta medida é caracterizada pela letra f.
Pontos antiprincipais
São pontos localizados a uma distância igual a 2f do centro óptico (O), ou seja, a uma distância f de um dos focos princiapais (F ou F'). Esta medida é caracterizada por A (para o ponto antiprincipal objeto) e A' (para o ponto antiprincipal imagem).
Vergência
Dada uma lente esférica em determinado meio, chamamos vergência da lente (V) a unidade caracterizada como o inverso da distância focal, ou seja:

A unidade utilizada para caracterizar a vergência no Sistema Internacional de Medidas é a dioptria, simbolozado por di.
Um dioptria equivale ao inverso de um metro, ou seja:
Uma unidade equivalente a dioptria, muito conhecida por quem usa óculos, é o "Grau".
1di = 1grau
Quando a lente é convergente usa-se distância focal positiva (f>0) e para uma lente divergente se usa distância focal negativa (f<0).
Por exemplo:
1) Considere uma lente convergente de distância focal 25cm = 0,25m.
Neste caso, é possível dizer que a lente tem vergência de +4di ou que ela tem convergência de 4di.
2) Considere uma lente divergente de distância focal 50cm = 0,5m.
Neste caso, é possível dizer que a lente tem vergência de -2di ou que ela tem divergênciade 2di.
Duas lentes podem ser colocadas de forma que funcionem como uma só, desde que sejam postas coaxialmente, isto é, com eixos principais coincidentes. Neste caso, elas serão chamadas de justapostas, se estiverem encostadas, ou separadas, caso haja uma distância d separando-as.
Estas associações são importantes para o entendimento dos instrumentos ópticos.
Quando duas lentes são associadas é possível obter uma lente equivalente. Esta terá a mesma característica da associação das duas primeiras.
Lembrando que se a lente equivalente tiver vergência positiva será convergente e se tiver vergência negativa será divergente.
Associação de lentes justapostas
Quando duas lentes são associadas de forma justaposta, utiliza-se o teorema das vergências para definir uma lente equivalente.
Como exemplo de associação justaposta temos:
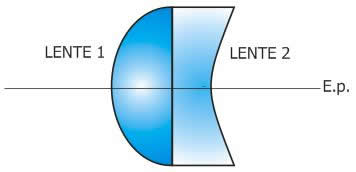
Este teorema diz que a vergência da lente equivalente à associação é igual à soma algébrica das vergências das lentes componentes. Ou seja:
Que também pode ser escrita como:
Associação de lentes separadas
Quando duas lentes são associadas de forma separada, utiliza-se uma generalização do teorema das vergências para definir uma lente equivalente.
Um exemplo de associação separada é:
A generalização do teorema diz que a vergência da lente equivalente à tal associação é igual a soma algébrica das vergências dos componetes menos o produto dessas vergências pela distância que separa as lentes. Desta forma:

Que também pode ser escrito como:
A câmera fotográfica é um equipamento capaz de projetar e armazenar uma imagem em um anteparo.
Nos antigos equipamentos, onde um filme deve ser posto dentro da câmera, o anteparo utilizado é um filme fotossensível capaz de propiciar uma reação química entre os sais do filme e a luz que incide nele.
No caso das câmeras digitais, uma das partes do anteparo consiste em um dispositivo eletrônico, conhecido como CCD (Charge-Coupled Device), que converte as intensidades de luz que incidem sobre ele em valores digitais armazenáveis na forma de Bits (pontos) e Bytes (dados). Existem os retroprojetores ou datashows
O funcionamento óptico da câmera fotográfica é basicamente equivalente ao de uma câmera escura, com a particularidade que, no lugar do orifício uma lente convergente é utilizada. No fundo da câmera encontra-se o anteparo no qual a imagem será gravada.

Um projetor é um equipamento provido de uma lente convergente (objetiva) que é capaz de fornecer imagens reais, invertidas e maiores que o objeto, que pode ser um slide ou filme.
Normalmente, os slides ou filmes são colocados invertidos, assim a imagem projetada será vista de forma direta.

A Lupa é o mais simples instrumento óptico de observação. Também é chamada de lente de aumento.
Uma lupa é constituida por uma lente convergente com distância focal na ordem de centímetros, capaz de conjugar uma imagem virtual, direta e maior que o objeto.
No entanto, este instrumento se mostra eficiente apenas quando o objeto observado estiver colocado entre o foco principal objeto e o centro óptico.

Quando uma lupa é presa a um suporte recebe a denominação de microscópio simples.
Um microscópio composto é um instrumento óptico composto fundalmentamente por um tubo delimitado nas suas extremidades por lentes esféricas convergentes, formando uma associação de lentes separadas.
A lente mais próxima do objeto observado é chamada objetiva, e é uma lente com distância focal na ordem de milímetros. A lente próxima ao observador é chamada ocular, e é uma lente com distância focal na ordem de centímetros.
O funcionamento de um miscroscópio composto é bastante simples. A objetiva fornece uma imagem real, invertida e maior que o objeto. Esta imagem funciona como objeto para o ocular, que funciona como uma lupa, fornecendo uma imagem final virtual, direta e maior.
Ou seja, o objeto é aumentado duplamente, fazendo com que objetos muito pequenos sejam melhores observados.

Este microscópio composto também é chamado Microscópio Óptico sendo capaz de aumentar até 2 000 vezes o objeto observado. Existem também Microscópios Eletrônicos de Transmissão capazes de proporcionar aumentos de até 100 000 vezes e Microscópios de Varredura que produzem aumentos superiores a 1 milhão de vezes.
Lunetas são instrumentos de observação a grandes distâncias, sendo úteis para observação de astros (luneta astronômica) ou para observação da superfície terrestre (luneta terrestre).
Uma luneta é basicamente montada da mesma forma que um microscópio composto, com objetiva e ocular, no entanto a objetiva da luneta tem distância focal na ordem de metros, sendo capaz de observar objetos afastados.

O olho humano é um sistema óptico complexo, formado por vários meios transparentes além de um sistema fisiológico com inúmeros componentes.
Todo o conjunto que compõe a visão humana é chamado globo ocular. A luz incide na córnea e converge até a retina, formando as imagens.
Para esta formação de imagem acontecem vários fenômenos fisiológicos. No entanto, para o estudo da óptica podemos considerar o olho como uma lente convergente, com distância focal variável, sendo representado da seguinte forma:
Tal representação é chamada olho reduzido, e traz a representação das distâncias entre a córnea e a lente e entre a lente e a retina, sendo a última a distância da imagem produzida em relação a lente (p').
Chama-se adaptação visual a capacidade apresentada pela pupila de se adequar à luminosidade de cada ambiente, comprimindo-se ou dilatando-se.
Em ambientes com grande luminosidade, a pupila pode atingir um diâmetro de até 1,5mm, fazendo com que entre menos luz no globo ocular, protegendo a retina de um possível ofuscamento.
Já em ambientes mais escuros, a pupila se dilata, atingindo diâmetro de até 10mm. Assim, a incidência de luminosidade aumenta no globo ocular, possibilitando a visão em tais ambientes.
Acomodação visual
As pessoas que têm visão considerada normal, emétropes, têm a capacidade de acomodar objetos de distâncias de 25 cm em média, até distâncias no infinito visual.
Ponto próximo
A primeira distância (25cm) corresponde ao ponto próximo, que é a mínima distância que um pessoa pode enxergar corretamente. O que caracteriza esta situação é que os músculos ciliares encontram-se totalmente contraídos.
Neste caso, pela equação de Gauss:
Considerando o olho com distância entre a lente e a retina de 15mm, ou seja, p'=15mm:
Neste caso, o foco da imagem será encontrado 14,1mm distante da lente.
Ponto remoto
Quanto à distância infinita, corresponde ao ponto remoto, que é a distância máxima alcançada para uma imagem focada. Nesta situação, os músculos ciliares encontram-se totalmente relaxados.
Da mesma forma que para o ponto próximo, podemos utilizar a equação de Gauss, para determinar o foco da imagem.
No entanto,  é um valor indeterminado, mas se pensarmos que infinito corresponde a um valor muito alto, veremos que esta divisão resultará em um valor muito pequeno, podendo ser desprezado.
é um valor indeterminado, mas se pensarmos que infinito corresponde a um valor muito alto, veremos que esta divisão resultará em um valor muito pequeno, podendo ser desprezado.
Assim, teremos que:

Ilusão de óptica são imagens que enganam momentaneamente o cérebro, deixando-o inconsciente confuso e fazendo com que este capte ideias falsas, preenchendo espaços que não ficam claros à primeira vista.
Podem ser fisiológicas, quando surgem naturalmente, ou cognitivas, quando se criam com artifícios visuais.
Uma das mais famosas imagens que causa ilusão de óptica foi criada em 1915 pelo cartunista W. E. Hill. Nesta figura, duas imagens podem ser vistas. Uma é uma garota, posicionada de perfil olhando para longe, a outra é o rosto de uma senhora idosa que olha para o chão.

MHS
Movimento Periódico e Oscilatório
No estudo dos movimentos oscilatórios estão fundamentados alguns dos maiores avanços para a ciência, como a primeira medição com precisão da aceleração da gravidade, a comprovação científica da rotação da Terra, além de inúmeros benefícios tecnológicos, como a invenção dos primeiros relógios mecânicos.
Movimento periódico
Um movimento periódico é caracterizado quando a posição, velocidade e aceleração de um corpo móvel se repetem em intervalos de tempo iguais, como por exemplo, o movimento do ponteiros dos relógios, de um ponto qualquer demarcado em um aro de uma bicicleta que anda com velocidade constante ou até o movimento realizado pelos planetas em torno do Sol.
Chamamos período do movimento (T) o intervalo de tempo que estes ciclos levam até se repetirem. Assim, ao decorrem-se um número (n) de repetições em um determinado intervalo de tempo (Δt), seu período será dado pela expressão:
Como n é uma grandeza adimensional, o período tem unidade igual à unidade de tempo. No SI, é medido em segundos (s).
Além do período, em um movimento periódico, é considerada uma grandeza chamada freqüência (f), que corresponde ao numero de repetições do movimento (n) em um determinado intervalo de tempo (Δt), ou seja:
Analisando as unidades da relação, a frequência é medida pelo inverso de unidade de tempo, ou seja 1/s que recebe o nome de hertz (Hz) no SI.
Comparando-se as equações do período e da frequência, podemos definir a relação entre elas como:
Movimento Oscilatório
Um movimento oscilatório acontece quando o sentido do movimento se alterna periodicamente, porém a trajetória é a mesma para ambos os sentidos. É o caso dos pêndulos e das cordas de guitarras e violões, por exemplo.
A figura abaixo representa uma corda em vibração, observe que mesmo se deslocando para baixo e para cima do ponto de origem ela sempre mantêm distâncias iguais de afastamento deste ponto.
Se considerarmos que o corpo começa a vibrar partindo da linha mais escura, cada vez que a corda passar por esta linha, após percorrer todas as outras linhas consideradas, dizemos que ela completou um ciclo, uma oscilação ou uma vibração.
Da mesma forma que para o movimento periódico, o intervalo decorrido para que se complete um ciclo é chamado período do movimento (T) e o número de ciclos completos em uma unidade de tempo é a frequência de oscilação.
Se você já esteve em um prédio alto, deve ter percebido que em dias de muito vento a sua estrutura balança. Não é só impressão! Algumas construções de grandes estruturas como edifícios e pontes costumam balançar em decorrência do vento. Estas vibrações, porém, acontecem com período de oscilação superior a 1 segundo, o que não causa preocupação. Uma construção só poderia ser prejudicada caso tivesse uma vibração natural com período igual à vibração do vento no local.
Chamamos um movimento de harmônico quando este pode ser descrito por funções horárias harmônicas (seno ou cosseno), que são assim chamadas devido à sua representação gráfica:
Função Seno
Função Cosseno
Quando isto acontece, o movimento é chamado Movimento Harmônico Simples (MHS).
Para que o estudo desse movimento seja simplificado, é possível analisá-lo como uma projeção de um movimento circular uniforme sobre um eixo. Assim:
Função horária da elongação
Imagine uma partícula se deslocando sobre um circunferência de raio A que chamaremos amplitude de oscilação.
Colocando o eixo x no centro do círculo que descreve o Movimento Curvilíneo Uniforme e comparando o deslocamento no Movimento Harmônico Simples:
Usando o que já conhecemos sobre MCU e projetando o deslocamento angular no eixo x podemos deduzir a função horária do deslocamento no Movimento Harmônico Simples:
Usando a relação trigonométrica do cosseno do ângulo para obter o valor de x:

Esta é a posição exata em que se encontra a partícula na figura mostrada, se considerarmos que, no MCU, este ângulo varia com o tempo, podemos escrever φ em função do tempo, usando a função horária do deslocamento angular:
Então, podemos substituir esta função na equação do MCU projetado no eixo x e teremos a função horária da elongação, que calcula a posição da partícula que descreve um MHS em um determinado instante t.
Função horária da velocidade
Partindo da função horária da elongação podem-se seguir pelo menos dois caminhos diferentes para determinar a função horária da velocidade. Um deles é utilizar cálculo diferencial e derivar esta equação em função do tempo obtendo uma equação para a velocidade no MHS.
Outra forma é continuar utilizando a comparação com o MCU, lembrando que, para o movimento circular, a velocidade linear é descrita como um vetor tangente à trajetória:
Decompondo o vetor velocidade tangencial:

Repare que o sinal de v é negativo pois o vetor tem sentido contrário ao vetor elongação, logo, o movimento é retrógrado.
Mas sabemos que em um MCU:
Assim, podemos substituir estas igualdades e teremos a função horária da velocidade no MHS:
Função horária da aceleração
Analogamente à função horária da velocidade, a função horária da aceleração pode ser obtida utilizando cálculo diferencial, ao derivar a velocidade em função do tempo. Mas também pode ser calculada usando a comparação com o MCU, lembrando que quando o movimento é circular uniforme a única aceleração pela qual um corpo está sujeito é aquela que o faz mudar de sentido, ou seja, a aceleração centrípeta.
Decompondo o vetor aceleração centrípeta:
Repare que o sinal de a é negativo pois o vetor tem sentido contrário ao vetor elongação, logo, o movimento é retrógrado.
Mas sabemos que em um MCU:
Podemos substituir estas igualdades e teremos a função horária da aceleração no MHS:
ou
Algumas observações importantes:
- A fase
 é sempre medida em radianos.
é sempre medida em radianos. - A pulsação
 pode ser definida por:
pode ser definida por:
- A fase inicial
 é o igual ao ângulo inicial do movimento em um ciclo trigonométrico, ou seja, é o ângulo de defasagem da onda senoidal.
é o igual ao ângulo inicial do movimento em um ciclo trigonométrico, ou seja, é o ângulo de defasagem da onda senoidal.
Por exemplo, no instante t=0, uma partícula que descreve um MHS está na posição  , então determina-se sua fase inicial representando o ponto dado projetado no ciclo trigonométrico:
, então determina-se sua fase inicial representando o ponto dado projetado no ciclo trigonométrico:
Exemplos:
(1) Uma partícula em MHS, com amplitude 0,5m, tem pulsação igual a  e fase inicial
e fase inicial  , qual sua elongação, velocidade e aceleração após 2 segundos do início do movimento?
, qual sua elongação, velocidade e aceleração após 2 segundos do início do movimento?

Força no Movimento Harmônico Simples
Assim como visto anteriormente, o valor da aceleração para uma partícula em MHS é dada por:
Então, pela 2ª Lei de Newton, sabemos que a força resultante sobre o sistema é dada pelo produto de sua massa e aceleração, logo:
Como a massa e a pulsação são valores constantes para um determinado MHS, podemos substituir o produto mω² pela constante k, denominada constante de força do MHS.
Obtendo:
Com isso concluímos que o valor algébrico da força resultante que atua sobre uma partícula que descreve um MHS é proporcional à elongação, embora tenham sinais opostos.
Esta é a característica fundamental que determina se um corpo realiza um movimento harmônico simples.
Chama-se a força que atua sobre um corpo que descreve MHS de força restauradora, pois ela atua de modo a garantir o prosseguimento das oscilações, restaurando o movimento anterior.
Sempre que a partícula passa pela posição central, a força tem o efeito de retardá-la para depois poder trazê-la de volta.
Ponto de equilíbrio do MHS
No ponto médio da trajetória, a elongação é numericamente igual a zero (x=0), conseqüentemente a força resultante que atua neste momento também é nula (F=0).
Este ponto onde a força é anulada é denominado ponto de equilíbrio do movimento.
Período do MHS
Grande parte das utilidades práticas do MHS está relacionado ao conhecimento de seu período (T), já que experimentalmente é fácil de medi-lo e partindo dele é possível determinar outras grandezas.
Como definimos anteriormente:
k=mω²
A partir daí podemos obter uma equação para a pulsação do MHS:
Mas, sabemos que:
Então, podemos chegar a expressão:

Como sabemos, a frequência é igual ao inverso do período, logo:
Exemplo:
(1) Um sistema é formado por uma mola pendurada verticalmente a um suporte em uma extremidade e a um bloco de massa 10kg. Ao ser posto em movimento o sistema repete seus movimentos após cada 6 segundos. Qual a constante da mola e a freqüencia de oscilação?
Para um sistema formado por uma massa e uma mola, a constante k é equivalente à constante elástica da mola, assim:

Um oscilador massa-mola ideal é um modelo físico composto por uma mola sem massa que possa ser deformada sem perder suas propriedades elásticas, chamada mola de Hooke, e um corpo de massa m que não se deforme sob ação de qualquer força.
Este sistema é fisicamente impossível já que uma mola, por mais leve que seja, jamais será considerada um corpo sem massa e após determinada deformação perderá sua elasticidade. Enquanto um corpo de qualquer substância conhecida, quando sofre a aplicação de uma força, é deformado, mesmo que seja de medidas desprezíveis.
Mesmo assim, para as condições que desejamos calcular, este é um sistema muito eficiente. E sob determinadas condições, é possível obtermos, com muita proximidade, um oscilador massa-mola.
Assim podemos descrever dois sistemas massa-mola básicos, que são:
Oscilador massa-mola horizontal
É composto por uma mola com constante elástica K de massa desprezível e um bloco de massa m, postos sobre uma superfície sem atrito, conforme mostra a figura abaixo:
Como a mola não está deformada, diz-se que o bloco encontra-se em posição de equilíbrio.
Ao modificar-se a posição do bloco para um ponto em x, este sofrerá a ação de uma força restauradora, regida pela lei de Hooke, ou seja:
Como a superfície não tem atrito, esta é a única força que atua sobre o bloco, logo é a força resultante, caracterizando um MHS.
Sendo assim, o período de oscilação do sistema é dado por:
Ao considerar a superfície sem atrito, o sistema passará a oscilar com amplitude igual à posição em que o bloco foi abandonado em x, de modo que:
Assim podemos fazer algumas observações sobre este sistema:
- O bloco preso à mola executa um MHS;
- A elongação do MHS, é igual à deformação da mola;
- No ponto de equilíbrio, a força resultante é nula.
Energia do Oscilador
Analisando a energia mecânica do sistema, tem-se que:
Quando o objeto é abandonado na posição x=A, a energia mecânica do sistema é igual à energia potencial elástica armazenada, pois não há movimento e, consequentemente, energia cinética. Assim:
Ao chegar na posição x=-A, novamente o objeto ficará momentaneamente parado (v=0), tendo sua energia mecânica igual à energia potencial elástica do sistema.
No ponto em que x=0, ocorrerá o fenômeno inverso ao da máxima elongação, sendo que:
Assim podemos concluir que na posição x=0, ocorre a velocidade máxima do sistema massa-mola, já que toda a energia mecânica é resultado desta velocidade.
Para todos os outros pontos do sistema:
Como não há dissipação de energia neste modelo, toda a energia mecânica é conservada durante o movimento de um oscilador massa-mola horizontal.
Oscilador massa-mola vertical
Imaginemos o sistema anterior, de uma mola de constante K e um bloco de massa m, que se aproximam das condições de um oscilador massa-mola ideal, com a mola presa verticalmente à um suporte e ao bloco, em um ambiente que não cause resistência ao movimento do sistema:
Podemos observar que o ponto onde o corpo fica em equilíbrio é:

Ou seja, é o ponto onde a força elástica e a força peso se anulam. Apesar da energia potencial elástica não ser nula neste ponto, considerá-se este o ponto inicial do movimento.
Partindo do ponto de equilíbrio, ao ser "puxado" o bloco, a força elástica será aumentada, e como esta é uma força restauradora e não estamos considerando as dissipações de energia, o oscilador deve se manter em MHS, oscilando entre os pontos A e -A, já que a força resultante no bloco será:
Mas, como o peso não varia conforme o movimento, este pode ser considerado como uma constante. Assim, a força varia proporcionalmente à elongação do movimento, portanto é um MHS.
Tendo seu período expresso por:
Um pêndulo é um sistema composto por uma massa acoplada a um pivô, que permite sua movimentação livremente. A massa fica sujeita à força restauradora causada pela gravidade.
Existem inúmeros pêndulos estudados por físicos, já que estes descrevem-no como um objeto de fácil previsão de movimentos e que possibilitou inúmeros avanços tecnológicos. Alguns deles são os pêndulos físicos, de torção, cônicos, de Foucalt, duplos, espirais, de Karter e invertidos. Mas o modelo mais simples e que tem maior utilização é o pêndulo simples.
Este pêndulo consiste em uma massa presa a um fio flexível e inextensível por uma de suas extremidades e livre por outra, representado da seguinte forma:
Quando afastamos a massa da posição de repouso e a soltamos, o pêndulo realiza oscilações. Ao desconsiderarmos a resistência do ar, as únicas forças que atuam sobre o pêndulo são a tensão com o fio e o peso da massa m. Desta forma:
A componente da força Peso que é dado por P.cosθ se anulará com a força de Tensão do fio, sendo assim, a única causa do movimento oscilatório é a P.senθ. Então:
No entanto, o ângulo θ, expresso em radianos que por definição é dado pelo quociente do arco descrito pelo ângulo, que no movimento oscilatório de um pêndulo é x e o raio de aplicação do mesmo, no caso, dado por ℓ, assim:
Onde ao substituirmos em F:
Assim é possível concluir que o movimento de um pêndulo simples não descreve um MHS, já que a força não é proporcional à elongação e sim ao seno dela. No entanto, para ângulos pequenos,  , o valor do seno do ângulo é aproximadamente igual a este ângulo.
, o valor do seno do ângulo é aproximadamente igual a este ângulo.
Então, ao considerarmos os caso de pequenos ângulos de oscilação:
Como P=mg, e m, g e ℓ são constantes neste sistema, podemos considerar que:
Então, reescrevemos a força restauradora do sistema como:
Sendo assim, a análise de um pêndulo simples nos mostra que, para pequenas oscilações, um pêndulo simples descreve um MHS.
Como para qualquer MHS, o período é dado por:
e como
Então o período de um pêndulo simples pode ser expresso por:

Uma onda é um movimento causado por uma perturbação, e esta se propaga através de um meio.
Um exemplo de onda é tido quando joga-se uma pedra em um lago de águas calmas, onde o impacto causará uma perturbação na água, fazendo com que ondas circulares se propagem pela superfície da água.
Também existem ondas que não podemos observar a olho nu, como, por exemplo, ondas de rádio, ondas de televisão, ondas ultra-violeta e microondas.
Além destas, existem alguns tipos de ondas que conhecemos bem, mas que não identificamos normalmente, como a luz e o som.
Mas o que elas têm em comum é que todas são energias propagadas através de um meio, e este meio não acompanha a propagação.
Classificação das ondas
Conforme sua natureza as ondas são classificadas em:
- Ondas Mecânicas: são ondas que necessitam de um meio material para se propagar, ou seja, sua propagação envolve o transporte de energia cinética e potencial e depende da elasticidade do meio. Por isto não é capaz de propagar-se no vácuo. Alguns exemplos são os que acontecem em molas e cordas, sons e em superfícies de líquidos.
- Ondas Eletromagnéticas: são ondas geradas por cargas elétricas oscilantes e sua propagação não depende do meio em que se encontram, podendo propagar-se no vácuo e em determinados meios materiais. Alguns exemplos são as ondas de rádio, de radar, os raios x e as microondas.
Todas as ondas eletromagnéticas tem em comum a sua velocidade de propagação no vácuo, próxima a 300000km/s, que é equivalente a 1080000000km/h.
Por que as ondas do mar quebram?
Sabendo que as ondas em geral têm como característica fundamental propagar energia sem que haja movimentação no meio, como explica-se o fenômeno de quebra das ondas do mar, causando movimentação de água, próximo à costa?
Em águas profundas as ondas do mar não transportam matéria, mas ao aproximar-se da costa, há uma brusca diminuição da profundidade onde se encontram, provocando a quebra destas ondas e causando uma movimentação de toda a massa de água e a formação de correntezas.
Após serem quebradas, as ondas do mar deixam de comportar-se como ondas.
|
Quanto a direção de propagação as ondas são classificadas como:
- Unidimensionais: que se propagam em apenas uma direção, como as ondas em cordas e molas esticadas;
- Bidimensionais: são aquelas que se propagam por uma superfície, como as água em um lago quando se joga uma pedra;
- Tridimensionais: são capazes de se propagar em todas as dimensões, como a luz e o som.
Quanto à direção da vibração as ondas podem ser classificadas como:
- Transversais: são as que são causadas por vibrações perpendiculares à propagação da onda, como, por exemplo, em uma corda:
- Longitudinais: são ondas causadas por vibrações com mesma direção da propagação, como as ondas sonoras.
Uma onda é formada por alguns componentes básicos que são:
Sendo A a amplitude da onda.
É denominado comprimento da onda, e expresso pela letra grega lambida (λ), a distância entre duas cristas ou dois vales consecutivos.
Chamamos período da onda (T) o tempo decorrido até que duas cristas ou dois vales consecutivos passem por um ponto e frequência da onda (f) o número de cristas ou vales consecutivos que passam por um mesmo ponto, em uma determinada unidade de tempo.
Portanto, o período e a frequência são relacionados por:
A unidade internacionalmente utilizada para a frequência é Hertz (Hz) sendo que 1Hz equivale à passagem de uma crista ou de um vale em 1 segundo.
Para o estudo de ondas bidimensionais e tridimensionais são necessários os conceitos de:
- frente de onda: é a fronteira da região ainda não atingida pela onda com a região já atingida;
- raio de onda: é possível definir como o raio de onda a linha que parte da fonte e é perpendicular às frentes de onda, indicando a direção e o sentido de propagação.
Velocidade de propagação das ondas
Como não transportam matéria em seu movimento, é previsível que as ondas se desloquem com velocidade contínua, logo estas devem ter um deslocamento que valide a expressão:
Que é comum aos movimentos uniformes, mas conhecendo a estrutura de uma onda:
Podemos fazer que ΔS=λ e que Δt=T. Assim:
Esta é a equação fundamental da Ondulatória, já que é valida para todos os tipos de onda.
É comum utilizar-se frequências na ordem de kHz (1quilohertz = 1000Hz) e de MHz (1megahertz = 1000000Hz)
Exemplo:
(1) Qual a frequência de ondas, se a velocidade desta onde é de 195m/s, e o seu comprimento de onda é de 1cm?
1cm=0,01m
Reflexão de ondas
É o fenômeno que ocorre quando uma onda incide sobre um obstáculo e retorna ao meio de propagação, mantendo as características da onda incidente.
Independentemente do tipo de onda, o módulo da sua velocidade permanece inalterado após a reflexão, já que ela continua propagando-se no mesmo meio.
Reflexão em ondas unidimensionais
Esta análise deve ser dividida em oscilações com extremidade fixa e com extremidade livre:
Com extremidade fixa:
Quando um pulso (meia-onda) é gerado, faz cada ponto da corda subir e depois voltar a posição original, no entanto, ao atingir uma extremidade fixa, como uma parede, a força aplicada nela, pelo princípio da ação e reação, reage sobre a corda, causando um movimento na direção da aplicação do pulso, com um sentido inverso, gerando um pulso refletido. Assim como mostra a figura abaixo:
Para este caso costuma-se dizer que há inversão de fase já que o pulso refletido executa o movimento contrário ao do pulso incidente.
Com extremidade livre:
Considerando uma corda presa por um anel a uma haste idealizada, portanto sem atrito.
Ao atingir o anel, o movimento é continuado, embora não haja deslocamento no sentido do pulso, apenas no sentido perpendicular a este. Então o pulso é refletido em direção da aplicação, mas com sentido inverso. Como mostra a figura:
Para estes casos não há inversão de fase, já que o pulso refletido executa o mesmo movimento do pulso incidente, apenas com sentido contrário.
É possível obter-se a extremidade livre, amarrando-se a corda a um barbante muito leve, flexível e inextensível.
Reflexão de ondas bidimensionais
Quando uma frente de onda, propagando-se em superfície líquida, incide sobre um obstáculo, cada ponto da frente reflete-se, então é possível representá-las por seus raios de onda.
A reflexão dos raios de onda é regida por duas leis da reflexão, que são apresentadas como:
- 1ª Lei da Reflexão: O raio incidente, o raio refletido e a reta perpendicular à superfície refletora no ponto de incidência estão contidos sempre no mesmo plano;
- 2ª Lei da Reflexão: Os ângulos formados entre o raio incidente e a reta perpendicular e entre o raio refletido e a reta perpendicular têm sempre a mesma medida.
Assim:
Como afirma a 2ª Lei, os ângulos têm valor igual, portanto:
Então pode-se imaginar que a reflexão das ondas aconteça como se fosse refletida em um espelho posto perpendicularmente ao ponto de incidência.
Considere a reflexão de ondas circulares:
Refração de ondas
É o fenômeno que ocorre quando uma onda passa de um meio para outro de características distintas, tendo sua direção desviada.
Independente de cada onda, sua frequência não é alterada na refração, no entanto, a velocidade e o comprimento de onda podem se modificar.
Através da refração é possíveis explicar inúmeros efeitos, como o arco-íris, a cor do céu no pôr-do-sol e a construção de aparelhos astronômicos.
A refração de ondas obedece duas leis que são:
- 1ª Lei da Refração: O raio incidente, a reta perpendicular à fronteira no ponto de incidência e o raio refratado estão contidos no mesmo plano.
- Lei de Snell: Esta lei relaciona os ângulos, as velocidades e os comprimentos de onda de incidência de refração, sendo matematicamente expressa por:
Aplicando a lei:
Conforme indicado na figura:
Como exemplos da refração, podem ser usadas ondas propagando-se na superfície de um líquido e passando por duas regiões distintas. É possível verificar experimentalmente que a velocidade de propagação nas superfícies de líquidos pode ser alterada modificando-se a profundidade deste local. As ondas diminuem o módulo de velocidade ao se diminuir a profundidade.
Superposição de ondas
A superposição, também chamada interferência em alguns casos, é o fenômeno que ocorre quando duas ou mais ondas se encontram, gerando uma onda resultante igual à soma algébrica das perturbações de cada onda.
Imagine uma corda esticada na posição horizontal, ao serem produzidos pulsos de mesma largura, mas de diferentes amplitudes, nas pontas da corda, poderá acontecer uma superposição de duas formas:
Situação 1: os pulsos são dados em fase.
No momento em que os pulsos se encontram, suas elongações em cada ponto da corda se somam algebricamente, sendo sua amplitude (elongação máxima) a soma das duas amplitudes:
Numericamente:
Após este encontro, cada um segue na sua direção inicial, com suas características iniciais conservadas.
Este tipo de superposição é chamado de interferência construtiva, já que a superposição faz com que a amplitude seja momentaneamente aumentada em módulo.
Situação 2: os pulsos são dados em oposição de fase.
Novamente, ao se encontrarem as ondas, suas amplitudes serão somadas, mas podemos observar que o sentido da onda de amplitude  é negativo em relação ao eixo vertical, portanto <0. Logo, o pulso resultante terá amplitude igual a diferença entre as duas amplitudes:
é negativo em relação ao eixo vertical, portanto <0. Logo, o pulso resultante terá amplitude igual a diferença entre as duas amplitudes:
Numericamente:
Sendo que o sinal negativo está ligado à amplitude e elongação da onda no sentido negativo.
Após o encontro, cada um segue na sua direção inicial, com suas características iniciais conservadas.
Este tipo de superposição é chamado de interferência destrutiva, já que a superposição faz com que a amplitude seja momentaneamente reduzida em módulo.
Superposição de ondas periódicas
A superposição de duas ondas periódicas ocorre de maneira análoga à superposição de pulsos.
Causando uma onda resultante, com pontos de elongação equivalentes à soma algébrica dos pontos das ondas sobrepostas.
A figura acima mostra a sobreposição de duas ondas com períodos iguais e amplitudes diferentes (I e II), que, ao serem sobrepostas, resultam em uma onda com amplitude equivalente às suas ondas (III). Este é um exemplo de interferência construtiva.

Já este outro exemplo, mostra uma interferência destrutiva de duas ondas com mesma frequência e mesma amplitude, mas em oposição de fase (I e II) que ao serem sobrepostas resultam em uma onda com amplitude nula (III).
Os principais exemplos de ondas sobrepostas são os fenômenos ondulatórios de batimento e ondas estacionárias.
- Batimento: Ocorre quando duas ondas periódicas de frequência diferente e mesma amplitude são sobrepostas, resultando em uma onda com variadas amplitudes dependentes do soma de amplitudes em cada crista resultante.
- Ondas estacionárias: É o fenômeno que ocorre quando são sobrepostas duas ondas com mesma frequência, velocidade e comprimento de onda, na mesma direção, mas em sentidos opostos.
Imagine duas ondas bidimensionais circulares, geradas respectivamente por uma fonte F1 e F2, com, amplitudes e frequências iguais, e em concordância de fase.
Considere a esquematização da interferência causada como:
Na figura a onda da esquerda tem cristas representadas por linhas contínuas pretas e vales por linhas tracejadas vermelhas e a onda da direita tem cristas representadas por linhas contínuas verdes e vales por linhas tracejadas azuis.
Os círculos preenchidos representam pontos de interferência construtiva, ou seja, em que a amplitude das ondas é somada.
Os círculos em branco representam pontos de interferência destrutiva, ou seja, em que a amplitude das ondas é subtraída.
Ressonância
É o fenômeno que acontece quando um sistema físico recebe energia por meio de excitações de frequência igual a uma de suas frequências naturais de vibração. Assim, o sistema físico passa a vibrar com amplitudes cada vez maiores.
Cada sistema físico capaz de vibrar possui uma ou mais frequências naturais, isto é, que são características do sistema, mais precisamente da maneira como este é construído. Como por exemplo, um pêndulo ao ser afastado do ponto de equilíbrio, cordas de um violão ou uma ponte para a passagem de pedestres sobre uma rodovia movimentada.
Todos estes sistemas possuem sua frequência natural, que lhes é característica. Quando ocorrem excitações periódicas sobre o sistema, como quando o vento sopra com frequência constante sobre uma ponte durante uma tempestade, acontece um fenômeno de superposição de ondas que alteram a energia do sistema, modificando sua amplitude.
Conforme estudamos anteriormente, se a frequência natural de oscilação do sistema e as excitações constantes sobre ele estiverem sob a mesma frequência, a energia do sistema será aumentada, fazendo com que vibre com amplitudes cada vez maiores.
Um caso muito famoso deste fenômeno foi o rompimento da ponte Tacoma Narrows, nos Estados Unidos, em 7 de novembro de 1940. Em um determinado momento o vento começou soprar com frequência igual à natural de oscilação da ponte, fazendo com que esta começasse a aumentar a amplitude de suas vibrações até que sua estrutura não pudesse mais suportar, fazendo com que sua estrutura rompesse.
O caso da ponte Tacoma Narrows pode ser considerado uma falha humana, já que o vento que soprava no dia 7 de Novembro de 1940 tinha uma frequência característica da região onde a ponte foi construída, logo os engenheiros responsáveis por sua construção falharam na análise das características naturais da região. Por isto, atualmente é feita uma análise profunda de todas as possíveis características que possam requerer uma alteração em uma construção civil.
Imagine que esta é uma ponte construída no estilo pênsil, e que sua frequência de oscilação natural é dada por:
Ao ser excitada periodicamente, por um vento de frequência:
A amplitude de oscilação da ponte passará a ser dada pela superposição das duas ondas:
Se a ponte não tiver uma resistência que suporte a amplitude do movimento, esta sofrerá danos podendo até ser destruída como a ponte Tacoma Narrows.
Princípio de Huygens
Christian Huygens (1629-1695), no final do século XVII, propôs um método de representação de frentes de onda, onde cada ponto de uma frente de onda se comporta como uma nova fonte de ondas elementares, que se propagam para além da região já atingida pela onda original e com a mesma frequência que ela. Esta ideia é conhecida como Princípio de Huygens.

Para um considerado instante, cada ponto da frente de onda comporta-se como fonte das ondas elementares de Huygens.
A partir deste princípio, é possível concluir que, em um meio homogêneo e com as mesmas características físicas em toda sua extensão, a frente de onda se desloca mantendo sua forma, desde que não haja obstáculos.
Desta forma:
Difração de ondas
Partindo do Princípio de Huygens, podemos explicar um outro fenômeno ondulatório, a difração.
O fenômeno chamado difração é o encurvamento sofrido pelos raios de onda quando esta encontra obstáculos à propagação.
Imagine a situação em que uma onda se propaga em um meio, até onde encontra uma fenda posta em uma barreira.
Este fenômeno prova que a generalização de que os raios de onda são retilíneos é errada, já que a parte que atinge a barreira é refletida, enquanto os raios que atingem a fenda passam por ela, mas nem todas continuam retas.
Se esta propagação acontecesse em linha reta, os raios continuariam retos, e a propagação depois da fenda seria uma faixa delimitada pela largura da fenda. No entanto, há um desvio nas bordas.
Este desvio é proporcional ao tamanho da fenda. Para o caso onde esta largura é muito inferior ao comprimento de onda, as ondas difratadas serão aproximadamente circulares, independente da forma geométrica das ondas incidentes.
Experiência de Young
Por volta do século XVII, apesar de vários físicos já defenderem a teoria ondulatória da luz, que afirmava que a luz era incidida por ondas, a teoria corpuscular de Newton, que descrevia a luz como um partícula, era muito bem aceita na comunidade científica.
Em 1801, o físico e médico inglês Thomas Young foi o primeiro a demonstrar, com sólidos resultados experimentais, o fenômeno de interferência luminosa, que tem por consequência a aceitação da teoria ondulatória. Embora, hoje em dia, a teoria aceita é a dualidade onda-partícula, enunciada pelo físico francês Louis-Victor de Broglie, baseado nas conclusões sobre as características dos fótons, de Albert Einstein.
Na experiência realizada por Young, são utilizados três anteparos, sendo o primeiro composto por um orifício, onde ocorre difração da luz incidida, o segundo, com dois orifícios, postos lado a lado, causando novas difrações. No último, são projetadas as manchas causadas pela interferência das ondas resultantes da segunda difração.
Ao substituir-se estes orifícios por fendas muito estreitas, as manchas tornam-se franjas, facilitando a visualização de regiões mais bem iluminadas (máximos) e regiões mal iluminadas (mínimos).
Observa-se que o máximo de maior intensidade acontece no centro, e que após este máximo, existem regiões de menor intensidade de luz, e outras de mínimo de intensidade, intercalando-se.
Acústica
Som e sua propagação
O som é definido como a propagação de uma frente de compressão mecânica ou onda longitudinal, se propagando tridimensionalmente pelo espaço e apenas em meios materiais, como o ar ou a água.
Para que esta propagação ocorra, é necessário que aconteçam compressões e rarefações em propagação do meio. Estas ondas se propagam de forma longitudinal.
Quando passa, a onda sonora não arrasta as partículas de ar, por exemplo, apenas faz com que estas vibrem em torno de sua posição de equilíbrio.
Como as ondas sonoras devem ser periódicas, é válida a relação da velocidade de propagação:
A audição humana considerada normal consegue captar frequências de onda sonoras que variam entre aproximadamente 20Hz e 20000Hz. São denominadas ondas de infra-som, as ondas que tem frequência menor que 20Hz, e ultra-som as que possuem frequência acima de 20000Hz.
De maneira que:

A velocidade do som na água é aproximadamente igual a 1450m/s e no ar, à 20°C é 343m/s.
A propagação do som em meios gasosos depende fortemente da temperatura do gás, é possível inclusive demonstrar experimentalmente que a velocidade do som em gases é dada por:
Onde:
k=constante que depende da natureza do gás;
T=temperatura absoluta do gás (em kelvin).
Como exemplo podemos tomar a velocidade de propagação do som no ar à temperatura de 15° (288K), que tem valor 340m/s.
Exemplo:
Sabendo que à 15°C o som se propaga à 340m/s, qual será sua velocidade de propagação à 100°C?
Lembrando que:
15° = 288K
100° = 373K

Intervalo acústico
A audição humana é capaz de diferenciar algumas características do som como a sua altura, intervalo e timbre.
A altura do som depende apenas de sua frequência, sendo definida como a diferenciação entre grave e agudo.
Um tom de maior frequência é agudo e um de menor é grave.
Os intervalos entre dois sons são dados pelo quociente entre suas frequências. Ou seja:
Como o intervalo é um quociente entre duas medidas de mesma unidade, este não tem dimensão.
Na música é dada uma nomenclatura para cada intervalo:
| Intervalo Acústico | Razão de frequência |
|---|---|
| Uníssono | 1:1 |
| Oitava | 2:1 |
| Quinta | 3:2 |
| Quarta | 4:3 |
| Terça maior | 5:4 |
| Terça menor | 6:5 |
| Sexta maior | 5:3 |
| Sexta menor | 8:5 |
| Tom maior (M) | 9:8 |
| Tom menor (m) | 10:9 |
| Semitom (s) | 16:15 |
As notas musicais de mesmo nome são separadas por um intervalo de uma oitava (2:1)
Dó Ré Mi Fá Sol Lá Si Dó
O timbre de um som é a característica que permite diferenciar dois sons de mesma altura e mesma intensidade, mas que são emitidos por instrumentos diferentes.
Desta forma, uma música executada por um violino e um piano se diferencia pelo timbre.
Intensidade sonora
A intensidade do som é a qualidade que nos permite caracterizar se um som é forte ou fraco e depende da energia que a onda sonora transfere.
A intensidade sonora (I) é definida fisicamente como a potência sonora recebida por unidade de área de uma superfície, ou seja:
Mas como a potência pode ser definida pela relação de energia por unidade de tempo:
Então, também podemos expressar a intensidade por:
As unidades mais usadas para a intensidade são J/m² e W/m².
É chamada mínima intensidade física, ou limiar de audibilidade, o menor valor da intensidade sonora ainda audível:
É chamada máxima intensidade física, ou limiar de dor, o maior valor da intensidade sonora suportável pelo ouvido:
Conforme um observador se afasta de uma fonte sonora, a intensidade sonora ou nível sonoro (β) diminui logaritmicamente, sendo representado pela equação:
A unidade utilizada para o nível sonoro é o Bel (B), mas como esta unidade é grande comparada com a maioria dos valores de nível sonoro utilizados no cotidiano, seu múltiplo usual é o decibel (dB), de maneira que 1B=10dB.
Assim como para qualquer outra onda, as ondas sonoras, ao atingirem um obstáculo fixo, como uma parede, são refletidas.
A reflexão do som acontece com inversão de fase, mas mantém a mesma velocidade de propagação, mesma frequência e o mesmo comprimento de onda do som incidente.
Um efeito muito conhecido causado pela reflexão do som é o efeito de eco. Que consiste na reflexão do som que bate em uma parede afastada.
Quando uma pessoa emite um som em direção a um obstáculo, este som é ouvido no momento da emissão, chamado som direto, e no momento em que o som refletido pelo obstáculo retorna a ele.
Sabemos que a velocidade é dada pela distância percorrida pelo som em um determinado tempo, esta distância é dada por duas vezes a distância ao obstáculo refletor, já que o som vai e volta. Assim:
E a velocidade é a de propagação do som no ar.
Ao receber um som, este "permanece" em nós por aproximadamente 0,1s, sendo este intervalo conhecido como persistência acústica.
Pela relação da velocidade:
Se este intervalo de tempo for inferior à persistência acústica (t < 0,1s), o som ouvido após ser refletido parecerá apenas um prolongamento do som direto. A este efeito dá-se o nome de reverberação. Para intervalos maiores que a persistência acústica (t > 0,1s) é instintivo perceber que esta reflexão será ouvida como eco.
Os outros fenômenos acontecem da mesma forma que para as outras ondas estudadas. Tendo uma utilização bastante conhecida a de interferência do som, onde é possível aplicar uma frequência anti-ruído, a fim de suavizar o som do ambiente.
Assim como as cordas ou molas, o ar ou gás contido dentro de um tubo pode vibrar com frequências sonoras. Este é o princípio que constitui instrumentos musicais como a flauta, corneta, clarinete, etc. que são construídos basicamente por tubos sonoros.
Nestes instrumentos, uma coluna de ar é posta a vibrar ao soprar-se uma das extremidades do tubo, chamada embocadura, que possui os dispositivos vibrantes apropriados.
Os tubos são classificados como abertos e fechados, sendo os tubos abertos aqueles que têm as duas extremidades abertas (sendo uma delas próxima à embocadura) e os tubos fechados que são os que têm uma extremidade aberta (próxima à embocadura) e outra fechada.
As vibrações das colunas gasosas podem ser estudadas como ondas estacionárias resultantes da interferência do som enviado na embocadura com o som refletido na outra extremidade do tubo.
Em uma extremidade aberta o som reflete-se em fase, formando um ventre (interferência construtiva) e em uma extremidade fechada ocorre reflexão com inversão de fase, formando-se um nó de deslocamento (interferência destrutiva).
Tubos abertos
Considerando um tubo sonoro de comprimento ℓ, cujas ondas se propagam a uma velocidade v.
Assim as possíveis configurações de ondas estacionárias são:
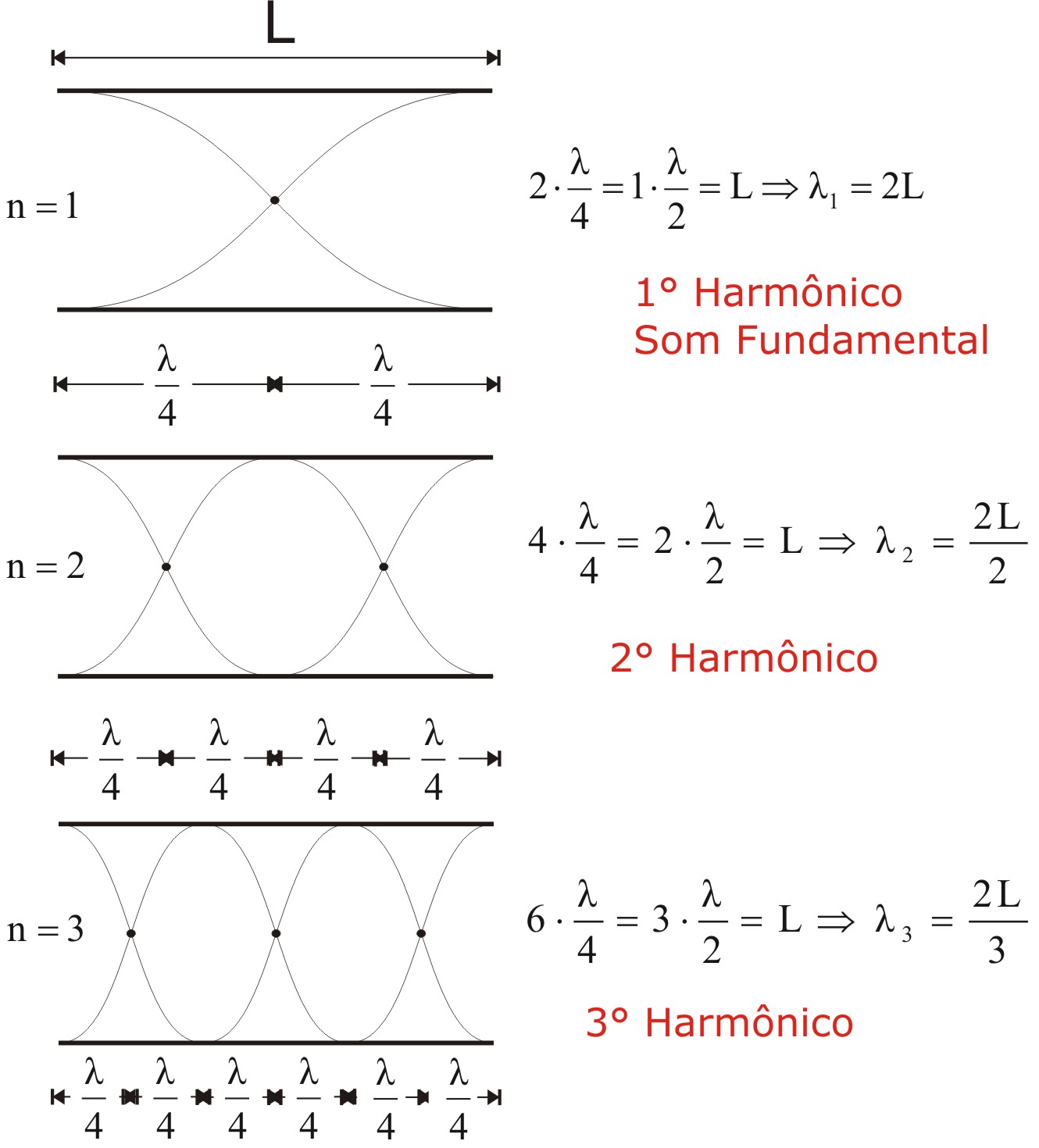
As maneiras de vibrar podem, partindo destes exemplos, ser generalizadas como:
E a frequência dos harmônicos será dada por:
Como n não tem restrições, no tubo aberto, obtêm-se frequências naturais de todos os harmônicos.
Tubos fechados
Considerando um tubo sonoro de comprimento ℓ, cujas ondas se propagam a uma velocidade v.
Assim as possíveis configurações de ondas estacionárias são:
As maneiras de vibrar podem, partindo destes exemplos, ser generalizadas como:
E a frequência dos harmônicos será dada por:
Em um tubo fechado, obtêm-se apenas frequências naturais dos harmônicos ímpares.
Efeito Doppler
Este efeito é descrito como uma característica observada em ondas emitidas ou refletidas por fontes em movimento relativo ao observador.
O efeito foi descrito teoricamente pela primeira vez em 1842 por Johann Christian Andreas Doppler, recebendo o nome Efeito Doppler em sua homenagem.
Para ondas sonoras, o efeito Doppler constitui o fenômeno pelo qual um observador percebe frequências diferentes das emitidas por uma fonte e acontece devido à velocidade relativa entre o a onda sonora e o movimento relativo entre o observador e/ou a fonte.
Considerando:
Podemos determinar uma fórmula geral para calcular a frequência percebida pelo observador, ou seja, a frequência aparente.
- Supondo que o observador esteja em repouso e a fonte se movimente:
Para o caso onde a fonte se aproxima do observador, há um encurtamento do comprimento da onda, relacionado à velocidade relativa, e a frequência real será menor que a observada, ou seja:
Mas, como a fonte se movimenta, sua velocidade também deve ser considerada, de modo que:
Substituindo  no cálculo da frequência observada:
no cálculo da frequência observada:

Ou seja:
Para o caso onde a fonte se afasta do observador, há um alongamento aparente do comprimento de onda, nesta situação a dedução do cálculo da frequência observada será análoga ao caso anterior.
No entanto:
Então:

Podemos escrever uma fórmula geral para os casos onde a fonte se desloque e o observador fique parado, se utilizarmos:
Sendo o sinal negativo utilizado no caso onde a fonte se aproxima e positivo no caso em que a fonte se afasta.
|
- Supondo que a fonte esteja em repouso e o observador se movimente:
No caso em que o observador se aproxima da fonte, em um mesmo intervalo de tempo ele encontrará mais frentes de onda do que se estivesse parado. Assim a frequência observada deverá ser maior que a frequência emitida pela fonte. Neste caso, o comprimento de onda não é alterado, mas a velocidade de propagação é ligeiramente aumentada.
Mas:
Quando estes dois valores são substituídos no cálculo da frequência observada temos:

Então:
No caso em que o observador se afasta da fonte, em um mesmo intervalo de tempo ele encontrará menor número de frentes de onda do que se estivesse parado. Assim a frequência observada deverá ser menor que a frequência emitida pela fonte. A dedução do cálculo da frequência observada será análoga ao caso anterior, no entanto a velocidade de propagação é ligeiramente reduzida.
Mas:
Quando estes dois valores são substituídos no cálculo da frequência observada temos:

Então:
Podemos escrever uma fórmula geral para os casos onde o observador se desloque e a fonte fique parada, se utilizarmos:
Sendo o sinal negativo utilizado no caso onde a fonte se aproxima e positivo no caso em que a fonte se afasta.
|
Conhecendo estas quatro possibilidades de alteração na frequência de onda observada podemos escrever uma fórmula geral para o efeito Doppler se combinarmos todos os resultados, sendo ela:
Sendo utilizados os sinais convenientes para cada caso.
Eletrostática
Cargas Elétricas
Toda a matéria que conhecemos é formada por moléculas. Esta, por sua vez, é formada de átomos, que são compostos por três tipos de partículas elementares: prótons, nêutrons e elétrons.
Os átomos são formados por um núcleo, onde ficam os prótons e nêutrons e uma eletrosfera, onde os elétrons permanecem, em órbita.
Os prótons e nêutrons têm massa praticamente igual, mas os elétrons têm massa milhares de vezes menor. Sendo m a massa dos prótons, podemos representar a massa dos elétrons como:
Ou seja, a massa dos elétrons é aproximadamente 2 mil vezes menor que a massa dos prótons.
Podemos representar um átomo, embora fora de escala, por:
Se pudéssemos separar os prótons, nêutrons e elétrons de um átomo, e lançá-los em direção à um imã, os prótons seriam desviados para uma direção, os elétrons a uma direção oposta a do desvio dos prótons e os nêutrons não seriam afetados.
Esta propriedade de cada uma das partículas é chamada carga elétrica. Os prótons são partículas com cargas positivas, os elétrons tem carga negativa e os nêutrons tem carga neutra.
Um próton e um elétron têm valores absolutos iguais, embora tenham sinais opostos. O valor da carga de um próton ou um elétron é chamado carga elétrica elementar e simbolizado por e.
A unidade de medida adotada internacionalmente para a medida de cargas elétricas é o coulomb (C).
A carga elétrica elementar é a menor quantidade de carga encontrada na natureza, comparando-se este valor com coulomb, têm-se a relação:
A unidade coulomb é definida partindo-se do conhecimento de densidades de corrente elétrica, medida em ampère (A), já que suas unidades são interdependentes.
Um coulomb é definido como a quantidade de carga elétrica que atravessa em um segundo, a secção transversal de um condutor percorrido por uma corrente igual a 1 ampère.
Eletrização
A única modificação que um átomo pode sofrer sem que haja reações de alta liberação e/ou absorção de energia é a perda ou ganho de elétrons.
Por isso, um corpo é chamado neutro se ele tiver número igual de prótons e de elétrons, fazendo com que a carga elétrica sobre o corpo seja nula.
Pela mesma analogia podemos definir corpos eletrizados positivamente e negativamente.
Um corpo eletrizado negativamente tem maior número de elétrons do que de prótons, fazendo com que a carga elétrica sobre o corpo seja negativa.
Um corpo eletrizado positivamente tem maior número de prótons do que de elétrons, fazendo com que a carga elétrica sobre o corpo seja positiva.
Fique atento:
É comum haver confusão sobre corpos positivamente carregados, principalmente, já que é plausível de se pensar que para que o corpo tenha carga elétrica positiva ele deva receber carga elétrica positiva, ou seja, ganhar prótons.
Quando na verdade um corpo está positivamente carregado se ele perder elétrons, ficando com menos carga elétrica negativa.
Para que durante os cálculos você não se confunda, lembre que a física vista a nível de ensino médio estuda apenas reações elementares e cotidianas, como o movimento de elétrons. As reações onde as partículas intranucleares (nêutrons e prótons) podem ser modificadas são estudadas na parte da ciência conhecida como Física Nuclear.
|
Eletrizar um corpo significa basicamente tornar diferente o número de prótons e de elétrons (adicionando ou reduzindo o número de elétrons).
Podemos definir a carga elétrica de um corpo (Q) pela relação:
Onde:
Q= Carga elétrica, medida em coulomb no SI
n= quantidade de cargas elementares, que é uma grandeza adimensional e têm sempre valor inteiro (n=1, 2, 3, 4 ...)
e= carga elétrica elementar ( )
)
A eletrostática é basicamente descrita por dois princípios, o da atração e repulsão de cargas conforme seu sinal (sinais iguais se repelem e sinais contrários se atraem) e a conservação de cargas elétricas, a qual assegura que em um sistema isolado, a soma de todas as cargas existentes será sempre constante, ou seja, não há perdas.
Processos de eletrização
Considera-se um corpo eletrizado quando este tiver número diferente de prótons e elétrons, ou seja, quando não estiver neutro.
O processo de retirar ou acrescentar elétrons a um corpo neutro para que este passe a estar eletrizado denomina-se eletrização. Alguns dos processos de eletrização mais comuns são os seguintes.
Eletrização por atrito
Este processo foi o primeiro de que se tem conhecimento. Foi descoberto por volta do século VI a.C. pelo matemático grego Tales de Mileto, que concluiu que o atrito entre certos materiais era capaz de atrair pequenos pedaços de palha e penas.
Posteriormente o estudo de Tales foi expandido, sendo possível comprovar que dois corpos neutros feitos de materiais distintos, quando são atritados entre si, um deles fica eletrizado negativamente (ganha elétrons) e outro positivamente (perde elétrons).
Quando há eletrização por atrito, os dois corpos ficam com cargas de módulo igual, porém com sinais opostos. Esta eletrização depende também da natureza do material, por exemplo, atritar um material  com uma material
com uma material  pode deixar carregado negativamente e positivamente, enquanto o atrito entre o material e outro material
pode deixar carregado negativamente e positivamente, enquanto o atrito entre o material e outro material  é capaz de deixar carregado negativamente e positivamente.
é capaz de deixar carregado negativamente e positivamente.
Convenientemente foi elaborada uma lista em dada ordem que um elemento ao ser atritado com o sucessor da lista fica eletrizado positivamente. Esta lista é chamada série triboelétrica:
Eletrização por contato
Outro processo capaz de eletrizar um corpo é feito por contato entre eles.
Se dois corpos condutores, sendo pelo menos um deles eletrizado, são postos em contato, a carga elétrica tende a se estabilizar, sendo redistribuída entre os dois, fazendo com que ambos tenham a mesma carga, inclusive com mesmo sinal.
O cálculo da carga resultante é dado pela média aritmética entre a carga dos condutores em contato. Por exemplo:
- Um corpo condutor A com carga
 é posto em contato com outro corpo neutro
é posto em contato com outro corpo neutro  . Qual é a carga em cada um deles após serem separados.
. Qual é a carga em cada um deles após serem separados.
- Um corpo condutor A com carga
 é posto em contato com outro corpo condutor B com carga
é posto em contato com outro corpo condutor B com carga  , após serem separados os dois o corpo A é posto em contato com um terceiro corpo condutor C de carga
, após serem separados os dois o corpo A é posto em contato com um terceiro corpo condutor C de carga  qual é a carga em cada um após serem separados?
qual é a carga em cada um após serem separados?
Ou seja, neste momento:
Após o segundo contato, tem-se:
E neste momento:
Ou seja, a carga após os contados no corpo A será +1C, no corpo B será -2C e no corpo C será +1C.
Um corpo eletrizado em contato com a terra será neutralizado, pois se ele tiver falta de elétrons, estes serão doados pela terra e se tiver excesso de elétrons, estes serão descarregados na terra.
Eletrização por indução eletrostática:
Este processo de eletrização é totalmente baseado no princípio da atração e repulsão, já que a eletrização ocorre apenas com a aproximação de um corpo eletrizado (indutor) a um corpo neutro (induzido). O processo é dividido em três etapas:
- Primeiramente um bastão eletrizado é aproximado de um condutor inicialmente neutro, pelo princípio de atração e repulsão, os elétrons livres do induzido são atraídos/repelidos dependendo do sinal da carga do indutor.

- O próximo passo é ligar o induzido à terra, ainda na presença do indutor.
- Desliga-se o induzido da terra, fazendo com que sua única carga seja a do sinal oposto ao indutor.
Após pode-se retirar o indutor das proximidades e o induzido estará eletrizado com sinal oposto à carga do indutor e as cargas se distribuem por todo o corpo.
Lei de Coulomb
Esta lei, formulada por Charles Augustin Coulomb, refere-se às forças de interação (atração e repulsão) entre duas cargas elétricas puntiformes, ou seja, com dimensão e massa desprezível.
Lembrando que, pelo princípio de atração e repulsão, cargas com sinais opostos são atraídas e com sinais iguais são repelidas, mas estas forças de interação têm intensidade igual, independente do sentido para onde o vetor que as descreve aponta.
O que a Lei de Coulomb enuncia é que a intensidade da força elétrica de interação entre cargas puntiformes é diretamente proporcional ao produto dos módulos de cada carga e inversamente proporcional ao quadrado da distância que as separa. Ou seja:
Lembrando que, pelo princípio de atração e repulsão, cargas com sinais opostos são atraídas e com sinais iguais são repelidas, mas estas forças de interação têm intensidade igual, independente do sentido para onde o vetor que as descreve aponta.
O que a Lei de Coulomb enuncia é que a intensidade da força elétrica de interação entre cargas puntiformes é diretamente proporcional ao produto dos módulos de cada carga e inversamente proporcional ao quadrado da distância que as separa. Ou seja:
Onde a equação pode ser expressa por uma igualdade se considerarmos uma constante k, que depende do meio onde as cargas são encontradas. O valor mais usual de k é considerado quando esta interação acontece no vácuo, e seu valor é igual a:
Então podemos escrever a equação da lei de Coulomb como:
Para se determinar se estas forças são de atração ou de repulsão utiliza-se o produto de suas cargas, ou seja:
Campo Elétrico
Assim como a Terra tem um campo gravitacional, uma carga Q também tem um campo que pode influenciar as cargas de prova q nele colocadas. E usando esta analogia, podemos encontrar:

Desta forma, assim como para a intensidade do campo gravitacional, a intensidade do campo elétrico (E) é definido como o quociente entre as forças de interação das cargas geradora do campo (Q) e de prova (q) e a própria carga de prova (q), ou seja:
Chama-se Campo Elétrico o campo estabelecido em todos os pontos do espaço sob a influência de uma carga geradora de intensidade Q, de forma que qualquer carga de prova de intensidade q fica sujeita a uma força de interação (atração ou repulsão) exercida por Q.
Já uma carga de prova, para os fins que nos interessam, é definida como um corpo puntual de carga elétrica conhecida, utilizado para detectar a existência de um campo elétrico, também possibilitando o cálculo de sua intensidade.
Vetor Campo Elétrico
Voltando à analogia com o campo gravitacional da Terra, o campo elétrico é definido como um vetor com mesma direção do vetor da força de interação entre a carga geradora Q e a carga de prova q e com mesmo sentido se q>0 e sentido oposto se q<0. Ou seja:
A unidade adotada pelo SI para o campo elétrico é o N/C (Newton por coulomb).
Interpretando esta unidade podemos concluir que o campo elétrico descreve o valor da força elétrica que atua por unidade de carga, para as cargas colocadas no seu espaço de atuação.
O campo elétrico pode ter pelo menos quatro orientações diferentes de seu vetor devido aos sinais de interação entre as cargas, quando o campo é gerado por apenas uma carga, estes são:
Quando a carga de prova tem sinal negativo (q<0), os vetores força e campo elétrico têm mesma direção, mas sentidos opostos, e quando a carga de prova tem sinal positivo (q>0), ambos os vetores têm mesma direção e sentido
Já quando a carga geradora do campo tem sinal positivo (Q>0), o vetor campo elétrico tem sentido de afastamento das cargas e quando tem sinal negativo (Q<0), tem sentido de aproximação, sendo que isto não varia com a mudança do sinal das cargas de provas.
|
Quando uma única partícula é responsável por gerar um campo elétrico, este é gerado em um espaço que a circunda, embora não esteja presente no ponto onde a partícula é encontrada.
Campo elétrico gerado por mais do que uma partícula eletrizada.
Quando duas ou mais cargas estão próximas o suficiente para que os campos gerados por cada uma se interfiram, é possível determinar um campo elétrico resultante em um ponto desta região.
Para isto, analisa-se isoladamente a influência de cada um dos campos gerados sobre um determinado ponto.
Por exemplo, imaginemos duas cargas postas arbitrariamente em um ponto A e outro B, com cargas  e
e  , respectivamente. Imaginemos também um ponto P sob a influência dos campos gerados pelas duas cargas simultaneamente.
, respectivamente. Imaginemos também um ponto P sob a influência dos campos gerados pelas duas cargas simultaneamente.
O vetor do campo elétrico resultante será dado pela soma dos vetores  e
e  no ponto P, como ilustram os exemplos a seguir.
no ponto P, como ilustram os exemplos a seguir.
Como as duas cargas geradoras do campo têm sinal positivo, cada uma delas gera um campo divergente (de afastamento), logo o vetor resultante terá módulo igual à subtração entre os valores dos vetores e direção e sentido do maior valor absoluto.
Assim como no exemplo anterior, ambos os campos elétricos gerados são divergentes, mas como existe um ângulo formado entre eles, esta soma vetorial é calculada através de regra do paralelogramo, ou seja, traçando-se o vetor soma dos dois vetores, tendo assim o módulo direção e sentido do vetor campo elétrico resultante.
Como ambas as cargas que geram o campo tem sinais negativos, cada componente do vetor campo resultante é convergente, ou seja, tem sentido de aproximação.
O módulo, a direção e o sentido deste vetor são calculados pela regra do paralelogramo, assim como ilustra a figura.
Neste exemplo, as cargas que geram o campo resultante têm sinais diferentes, então um dos vetores converge em relação à sua carga geradora () e outro diverge ().
Então podemos generalizar esta soma vetorial para qualquer número finito de partículas, de modo que:
Linhas de força
Estas linhas são a representação geométrica convencionada para indicar a presença de campos elétricos, sendo representadas por linhas que tangenciam os vetores campo elétrico resultante em cada ponto, logo, jamais se cruzam. Por convenção, as linhas de força têm a mesma orientação do vetor campo elétrico, de modo que para campos gerados por cargas positivas as linhas de força são divergentes (sentido de afastamento) e campos gerados por cargas elétricas negativas são representados por linhas de força convergentes (sentido de aproximação).
Quando se trabalha com cargas geradoras sem dimensões, as linhas de força são representadas radialmente, de modo que:
Densidade Superficial de cargas
Um corpo em equilíbrio eletrostático, ou seja, quando todos possíveis responsáveis por sua eletrização acomodam-se em sua superfície, pode ser caracterizado por sua densidade superficial média de cargas  , que por definição é o resultado do quociente da carga elétrica Q, pela área de sua superfície A.
, que por definição é o resultado do quociente da carga elétrica Q, pela área de sua superfície A.
Sendo sua unidade adotada no SI o C/m².
Observe que para cargas negativas a densidade superficial média de cargas também é negativa, já que a área sempre é positiva.
Utiliza-se o termo médio já que dificilmente as cargas elétricas se distribuem uniformemente por toda a superfície de um corpo, de modo que é possível constatar que o módulo desta densidade é inversamente proporcional ao seu raio de curvatura, ou seja, em objetos pontiagudos eletrizados há maior concentração de carga em sua extremidade (ponta).
Campo Elétrico Uniforme (CEU)
Dizemos que um campo elétrico é uniforme em uma região quando suas linhas de força são paralelas e igualmente espaçadas umas das outras, o que implica que seu vetor campo elétrico nesta região  têm, em todos os pontos, mesma intensidade, direção e sentido.
têm, em todos os pontos, mesma intensidade, direção e sentido.
Uma forma comum de se obter um campo elétrico uniforme é utilizando duas placas condutoras planas e iguais. Se as placas forem postas paralelamente, tendo cargas de mesma intensidade, mas de sinal oposto, o campo elétrico gerado entre elas será uniforme.
Potencial Elétrico
Imagine um campo elétrico gerado por uma carga Q, ao ser colocada um carga de prova q em seu espaço de atuação podemos perceber que, conforme a combinação de sinais entre as duas cargas, esta carga q, será atraída ou repelida, adquirindo movimento, e conseqüentemente Energia Cinética.
Lembrando da energia cinética estudada em mecânica, sabemos que para que um corpo adquira energia cinética é necessário que haja uma energia potencial armazenada de alguma forma. Quando esta energia está ligada à atuação de um campo elétrico, é chamada Energia Potencial Elétrica ou Eletrostática, simbolizada por  .
.
A unidade usada para a é o joule (J).
Pode-se dizer que a carga geradora produz um campo elétrico que pode ser descrito por uma grandeza chamada Potencial Elétrico (ou eletrostático).
De forma análoga ao Campo Elétrico, o potencial pode ser descrito como o quociente entre a energia potencial elétrica e a carga de prova q. Ou seja:
Logo:
A unidade adotada, no SI para o potencial elétrico é o volt (V), em homenagem ao físico italiano Alessandro Volta, e a unidade designa Joule por coulomb (J/C).
Quando existe mais de uma partícula eletrizada gerando campos elétricos, em um ponto P que está sujeito a todas estes campos, o potencial elétrico é igual à soma de todos os potenciais criados por cada carga, ou seja:
Uma maneira muito utilizada para se representar potenciais é através de equipotenciais, que são linhas ou superfícies perpendiculares às linhas de força, ou seja, linhas que representam um mesmo potencial.
Para o caso particular onde o campo é gerado por apenas uma carga, estas linhas equipotenciais serão circunferências, já que o valor do potencial diminui uniformemente em função do aumento da distância (levando-se em conta uma representação em duas dimensões, pois caso a representação fosse tridimensional, os equipotenciais seriam representados por esferas ocas, o que constitui o chamado efeito casca de cebola, onde quanto mais interna for a casca, maior seu potencial).
Trabalho de uma força elétrica
O trabalho  que uma carga elétrica realiza é análogo ao trabalho realizado pelas outras energias potenciais usadas no estudo de mecânica, ou seja:
que uma carga elétrica realiza é análogo ao trabalho realizado pelas outras energias potenciais usadas no estudo de mecânica, ou seja:
Se imaginarmos dois pontos em um campo elétrico, cada um deles terá energia potencial dada por:
Sendo o trabalho realizado entre os dois pontos:
Mas sabemos que, quando a força considerada é a eletrostática, então:
Diferença de potencial entre dois pontos
Considere dois pontos de um campo elétrico, A e B, cada um com um posto a uma distância diferente da carga geradora, ou seja, com potenciais diferentes. Se quisermos saber a diferença de potenciais entre os dois devemos considerar a distância entre cada um deles.
Então teremos que sua tensão ou d.d.p (diferença de potencial) será expressa por U e calculada por:
Eletrodinâmica
Corrente Elétrica
Ao se estudarem situações onde as partículas eletricamente carregadas deixam de estar em equilíbrio eletrostático passamos à situação onde há deslocamento destas cargas para um determinada direção e em um sentido, este deslocamento é o que chamamos corrente elétrica.
Estas correntes elétricas são responsáveis pela eletricidade considerada utilizável por nós.
Normalmente utiliza-se a corrente causada pela movimentação de elétrons em um condutor, mas também é possível haver corrente de íons positivos e negativos (em soluções eletrolíticas ou gases ionizados).
A corrente elétrica é causada por uma diferença de potencial elétrico (d.d.p./ tensão). E ela é explicada pelo conceito de campo elétrico, ou seja, ao considerar uma carga A positiva e outra B, negativa, então há um campo orientado da carga A para B. Ao ligar-se um fio condutor entre as duas os elétrons livres tendem a se deslocar no sentido da carga positiva, devido ao fato de terem cargas negativas, lembrando que sinais opostos são atraídos.
Desta forma cria-se uma corrente elétrica no fio, com sentido oposto ao campo elétrico, e este é chamado sentido real da corrente elétrica. Embora seja convencionado que a corrente tenha o mesmo sentido do campo elétrico, o que não altera em nada seus efeitos (com exceção para o fenômeno chamado Efeito Hall), e este é chamado o sentido convencional da corrente.
Para calcular a intensidade da corrente elétrica (i) na secção transversal de um condutor se considera o módulo da carga que passa por ele em um intervalo de tempo, ou seja:
Considerando |Q|=n e
A unidade adotada para a intensidade da corrente no SI é o ampère (A), em homenagem ao físico francês Andre Marie Ampère, e designa coulomb por segundo (C/s).
Sendo alguns de seus múltiplos:
Continuidade da corrente elétrica
Para condutores sem dissipação, a intensidade da corrente elétrica é sempre igual, independente de sua secção transversal, esta propriedade é chamada continuidade da corrente elétrica.
Isto implica que se houver "opções de caminho" em um condutor, como por exemplo, uma bifurcação do fio, a corrente anterior a ela será igual à soma das correntes em cada parte desta bifurcação, ou seja:
Resistência Elétrica
Ao aplicar-se uma tensão U, em um condutor qualquer se estabelece nele uma corrente elétrica de intensidade i. Para a maior parte dos condutores estas duas grandezas são diretamente proporcionais, ou seja, conforme uma aumenta o mesmo ocorre à outra.
Desta forma:
A esta constante chama-se resistência elétrica do condutor (R), que depende de fatores como a natureza do material. Quando esta proporcionalidade é mantida de forma linear, chamamos o condutor de ôhmico, tendo seu valor dado por:
Sendo R constante, conforme enuncia a 1ª Lei de Ohm: Para condutores ôhmicos a intensidade da corrente elétrica é diretamente proporcional à tensão (ddp) aplicada em seus terminais.
A resistência elétrica também pode ser caracterizada como a "dificuldade" encontrada para que haja passagem de corrente elétrica por um condutor submetido a uma determinada tensão. No SI a unidade adotada para esta grandeza é o ohm (Ω), em homenagem ao físico alemão Georg Simon Ohm.
Pode-se também definir uma grandeza chamada Condutância elétrica (G), como a facilidade que uma corrente tem em passar por um condutor submetido à determinada tensão, ou seja, este é igual ao inverso da resistência:
E sua unidade, adotada pelo SI é o siemens (S), onde:
Geradores de corrente elétrica
A corrente sempre existe enquanto há diferença de potencial entre dois corpos ligados, por um condutor, por exemplo, mas esta tem pequena duração quando estes corpos são eletrizados pelos métodos vistos em eletrostática, pois entram rapidamente em equilíbrio.
A forma encontrada para que haja uma diferença de potencial mais duradoura é a criação de geradores elétricos, que são construídos de modo que haja tensão por um intervalo maior de tempo.
Existem diversos tipos de geradores elétricos, que são caracterizados por seu princípio de funcionamento, alguns deles são:
Geradores luminosos
São sistemas de geração de energia construídos de modo a transformar energia luminosa em energia elétrica, como por exemplo, as placas solares feitas de um composto de silício que converte a energia luminosa do sol em energia elétrica.
Geradores mecânicos
São os geradores mais comuns e com maior capacidade de criação de energia. Transformam energia mecânica em energia elétrica, principalmente através de magnetismo. É o caso dos geradores encontrados em usinas hidroelétricas, termoelétricas e termonucleares.
Geradores químicos
São construídos de forma capaz de converter energia potencial química em energia elétrica (contínua apenas). Este tipo de gerador é muito encontrado como baterias e pilhas.
Geradores térmicos
São aqueles capazes de converter energia térmica em energia elétrica, diretamente.
Quando associados dois, ou mais geradores como pilhas, por exemplo, a tensão e a corrente se comportam da mesma forma como nas associações de resistores, ou seja:
- Associação em série: corrente nominal e tensão é somada.
- Associação em paralelo: corrente é somada e tensão nominal.
Se considerarmos um gráfico i x t (intensidade de corrente elétrica por tempo), podemos classificar a corrente conforme a curva encontrada, ou seja:
Corrente contínua
Uma corrente é considerada contínua quando não altera seu sentido, ou seja, é sempre positiva ou sempre negativa.
A maior parte dos circuitos eletrônicos trabalha com corrente contínua, embora nem todas tenham o mesmo "rendimento", quanto à sua curva no gráfico i x t, a corrente contínua pode ser classificada por:
Corrente contínua constante
Diz-se que uma corrente contínua é constante, se seu gráfico for dado por um segmento de reta constante, ou seja, não variável. Este tipo de corrente é comumente encontrado em pilhas e baterias.
Corrente contínua pulsante
Embora não altere seu sentido as correntes contínuas pulsantes passam periodicamente por variações, não sendo necessariamente constantes entre duas medidas em diferentes intervalos de tempo.
A ilustração do gráfico acima é um exemplo de corrente contínua constante.
Esta forma de corrente é geralmente encontrada em circuitos retificadores de corrente alternada.
Corrente alternada
Dependendo da forma como é gerada a corrente, esta é invertida periodicamente, ou seja, ora é positiva e ora é negativa, fazendo com que os elétrons executem um movimento de vai-e-vem.
Este tipo de corrente é o que encontramos quando medimos a corrente encontrada na rede elétrica residencial, ou seja, a corrente medida nas tomada de nossa casa.
Resistores
São peças utilizadas em circuitos elétricos que tem como principal função converter energia elétrica em energia térmica, ou seja, são usados como aquecedores ou como dissipadores de eletricidade.
Alguns exemplos de resistores utilizados no nosso cotidiano são: o filamento de uma lâmpada incandescente, o aquecedor de um chuveiro elétrico, os filamentos que são aquecidos em uma estufa, entre outros.
Em circuitos elétricos teóricos costuma-se considerar toda a resistência encontrada proveniente de resistores, ou seja, são consideradas as ligações entre eles como condutores ideais (que não apresentam resistência), e utilizam-se as representações:
Associação de Resistores
Em um circuito é possível organizar conjuntos de resistores interligados, chamada associação de resistores. O comportamento desta associação varia conforme a ligação entre os resistores, sendo seus possíveis tipos: em série, em paraleloe mista.
Associação em Série
Associar resistores em série significa ligá-los em um único trajeto, ou seja:
Como existe apenas um caminho para a passagem da corrente elétrica esta é mantida por toda a extensão do circuito. Já a diferença de potencial entre cada resistor irá variar conforme a resistência deste, para que seja obedecida a 1ª Lei de Ohm, assim:
Esta relação também pode ser obtida pela análise do circuito:
Sendo assim a diferença de potencial entre os pontos inicial e final do circuito é igual à:
Analisando esta expressão, já que a tensão total e a intensidade da corrente são mantidas, é possível concluir que a resistência total é:
Ou seja, um modo de se resumir e lembrar-se das propriedades de um circuito em série é:
| Tensão (ddp) (U) | se divide |
| Intensidade da corrente (i) | se conserva |
| Resistência total (R) | soma algébrica das resistências em cada resistor. |
Associação em Paralelo
Ligar um resistor em paralelo significa basicamente dividir a mesma fonte de corrente, de modo que a ddp em cada ponto seja conservada. Ou seja:
Usualmente as ligações em paralelo são representadas por:
Como mostra a figura, a intensidade total de corrente do circuito é igual à soma das intensidades medidas sobre cada resistor, ou seja:
Pela 1ª lei de ohm:
E por esta expressão, já que a intensidade da corrente e a tensão são mantidas, podemos concluir que a resistência total em um circuito em paralelo é dada por:
Associação Mista
Uma associação mista consiste em uma combinação, em um mesmo circuito, de associações em série e em paralelo, como por exemplo:
Em cada parte do circuito, a tensão (U) e intensidade da corrente serão calculadas com base no que se conhece sobre circuitos série e paralelos, e para facilitar estes cálculos pode-se reduzir ou redesenhar os circuitos, utilizando resistores resultantes para cada parte, ou seja:
Sendo:

Efeito Joule
A corrente elétrica é resultado de movimentação de ânions, cátions ou elétrons livres, como já vimos. Ao existir corrente elétrica as partículas que estão em movimento acabam colidindo com as outras partes do condutor que se encontra em repouso, causando uma excitação que por sua vez irá gerar um efeito de aquecimento. A este efeito dá-se o nome efeito Joule.
O aquecimento no fio pode ser medido pela lei de joule, que é matematicamente expressa por:
Esta relação é valida desde que a intensidade da corrente seja constante durante o intervalo de tempo de ocorrência.
Potência Elétrica
A potência elétrica dissipada por um condutor é definida como a quantidade de energia térmica que passa por ele durante uma quantidade de tempo.
A unidade utilizada para energia é o watt (W), que designa joule por segundo (J/s)
Ao considerar que toda a energia perdida em um circuito é resultado do efeito Joule, admitimos que a energia transformada em calor é igual a energia perdida por uma carga q que passa pelo condutor. Ou seja:
Mas, sabemos que:
Então:
Logo:
Mas sabemos que  , então podemos escrever que:
, então podemos escrever que:
Por exemplo:
Qual a corrente que passa em uma lâmpada de 60W em uma cidade onde a tensão na rede elétrica é de 220V?
Pela 1ª Lei de Ohm temos que  , então podemos definir duas formas que relacionem a potência elétrica com a resistência.
, então podemos definir duas formas que relacionem a potência elétrica com a resistência.
Então se utilizando do exemplo anterior, qual a resistência do filamento interno da lâmpada?
Consumo de energia
Cada aparelho que utiliza a eletricidade para funcionar, como por exemplo, o computador de onde você lê esse texto, consome uma quantidade de energia elétrica.
Para calcular este consumo basta sabermos a potência do aparelho e o tempo de utilização dele, por exemplo, se quisermos saber quanta energia gasta um chuveiro de 5500W ligado durante 15 minutos, seu consumo de energia será:
Mas este cálculo nos mostra que o joule (J) não é uma unidade eficiente neste caso, já que o cálculo acima se refere a apenas um banho de 15 minutos, imagine o consumo deste chuveiro em uma casa com 4 moradores que tomam banho de 15 minutos todos os dias no mês.
Para que a energia gasta seja compreendida de uma forma mais prática podemos definir outra unidade de medida, que embora não seja adotada no SI, é mais conveniente.
Essa unidade é o quilowatt-hora (kWh).
Para calcularmos o consumo do chuveiro do exemplo anterior nesta unidade consideremos sua potência em kW e o tempo de uso em horas, então teremos:
O mais interessante em adotar esta unidade é que, se soubermos o preço cobrado por kWh, podemos calcular quanto será gasta em dinheiro por este consumo.
Por exemplo:
Considere que em sua cidade a companhia de energia elétrica tenha um tarifa de 0,300710 R$/kWh, então o consumo do chuveiro elétrico de 5500W ligado durante 15 minutos será:
Se considerarmos o caso da família de 4 pessoas que utiliza o chuveiro diariamente durante 15 minutos, o custo mensal da energia gasta por ele será:
Segunda lei de Ohm
Esta lei descreve as grandezas que influenciam na resistência elétrica de um condutor, conforme cita seu enunciado:
A resistência de um condutor homogêneo de secção transversal constante é proporcional ao seu comprimento e da natureza do material de sua construção, e é inversamente proporcional à área de sua secção transversal. Em alguns materiais também depende de sua temperatura.
Sendo expressa por:
Onde:
ρ= resistividade, depende do material do condutor e de sua temperatura.
ℓ= largura do condutor
A= área da secção transversal.
Como a unidade de resistência elétrica é o ohm (Ω), então a unidade adotada pelo SI para a resistividade é  .
.
Capacitores
Em circuitos eletrônicos alguns componentes necessitam que haja alimentação em corrente contínua, enquanto a fonte está ligada em corrente alternada. A resolução deste problema é um dos exemplos da utilidade de um capacitor.
Este equipamento é capaz de armazenar energia potencial elétrica durante um intervalo de tempo, ele é construído utilizando um campo elétrico uniforme. Um capacitor é composto por duas peças condutoras, chamadas armaduras e um material isolante com propriedades específicas chamado dielétrico.
Para que haja um campo elétrico uniforme é necessário que haja uma interação específica, limitando os possíveis formatos geométricos de um capacitor, assim alguns exemplos de capacitores são:
Capacitores planos
Capacitores cilíndricos
Um ímã é definido com um objeto capaz de provocar um campo magnético à sua volta e pode ser natural ou artificial.
Um ímã natural é feito de minerais com substâncias magnéticas, como por exemplo, a magnetita, e um ímã artificial é feito de um material sem propriedades magnéticas, mas que pode adquirir permanente ou instantaneamente características de um ímã natural.
Os ímãs artificiais também são subdivididos em: permanentes, temporais ou eletroímãs.
- Um ímã permanente é feito de material capaz de manter as propriedades magnéticas mesmo após cessar o processo de imantação, estes materiais são chamados ferromagnéticos.
- Um ímã temporal tem propriedades magnéticas apenas enquanto se encontra sob ação de outro campo magnético, os materiais que possibilitam este tipo de processo são chamados paramagnéticos.
- Um eletroímã é um dispositivo composto de um condutor por onde circula corrente elétrica e um núcleo, normalmente de ferro. Suas características dependem da passagem de corrente pelo condutor; ao cessar a passagem de corrente cessa também a existência do campo magnético.
Propriedades dos ímãs
Polos magnéticos
São as regiões onde se intensificam as ações magnéticas. Um ímã é composto por dois polos magnéticos, norte e sul, normalmente localizados em suas extremidades, exceto quando estas não existirem, como em um ímã em forma de disco, por exemplo. Por esta razão são chamados dipolos magnéticos.
Para que sejam determinados estes polos, se deve suspender o ímã pelo centro de massa e ele se alinhará aproximadamente ao polo norte e sul geográfico recebendo nomenclatura equivalente. Desta forma, o polo norte magnético deve apontar para o polo norte geográfico e o polo sul magnético para o polo sul geográfico.
Atração e repulsão
Ao manusear dois ímãs percebemos claramente que existem duas formas de colocá-los para que estes sejam repelidos e duas formas para que sejam atraídos. Isto se deve ao fato de que polos com mesmo nome se repelem, mas polos com nomes diferentes se atraem, ou seja:
Esta propriedade nos leva a concluir que os polos norte e sul geográficos não coincidem com os polos norte e sul magnéticos. Na verdade eles se encontram em pontos praticamente opostos, como mostra a figura abaixo:
A inclinação dos eixos magnéticos em relação aos eixos geográficos é de aproximadamente 191°, fazendo com os seus polos sejam praticamente invertidos em relação aos polos geográficos.
Interação entre polos
Dois polos se atraem ou se repelem, dependendo de suas características, à razão inversa do quadrado da distância entre eles. Ou seja, se uma força de interação F é estabelecida a uma distância d, ao dobrarmos esta distância a força observada será igual a uma quarta parte da anterior F/4. E assim sucessivamente.
Inseparabilidade dos polos de um ímã
Esta propriedade diz que é impossível separar os polos magnéticos de um ímã, já que toda vez que este for dividido serão obtidos novos polos, então se diz que qualquer novo pedaço continuará sendo um dipolo magnético.
Campo Magnético
É a região próxima a um ímã que influencia outros ímãs ou materiais ferromagnéticos e paramagnéticos, como cobalto e ferro.
Compare campo magnético com campo gravitacional ou campo elétrico e verá que todos estes têm as características equivalentes.
Também é possível definir um vetor que descreva este campo, chamado vetor indução magnética e simbolizado por  . Se pudermos colocar uma pequena bússola em um ponto sob ação do campo o vetor terá direção da reta em que a agulha se alinha e sentido para onde aponta o polo norte magnético da agulha.
. Se pudermos colocar uma pequena bússola em um ponto sob ação do campo o vetor terá direção da reta em que a agulha se alinha e sentido para onde aponta o polo norte magnético da agulha.
Se pudermos traçar todos os pontos onde há um vetor indução magnética associado veremos linhas que são chamadas linhas de indução do campo magnético. estas são orientados do polo norte em direção ao sul, e em cada ponto o vetor tangencia estas linhas.
As linhas de indução existem também no interior do ímã, portanto são linhas fechadas e sua orientação interna é do polo sul ao polo norte. Assim como as linhas de força, as linhas de indução não podem se cruzar e são mais densas onde o campo é mais intenso.
Campo Magnético Uniforme
De maneira análoga ao campo elétrico uniforme, é definido como o campo ou parte dele onde o vetor indução magnética é igual em todos os pontos, ou seja, tem mesmo módulo, direção e sentido. Assim sua representação por meio de linha de indução é feita por linhas paralelas e igualmente espaçadas.
A parte interna dos imãs em forma de U aproxima um campo magnético uniforme.
Efeitos de um campo magnético sobre cargas
Como os elétrons e prótons possuem características magnéticas, ao serem expostos à campos magnéticos, interagem com este, sendo submetidos a uma força magnética  .
.
Supondo:
- campos magnéticos estacionários, ou seja, que o vetor campo magnético
 em cada ponto não varia com o tempo;
em cada ponto não varia com o tempo; - partículas com uma velocidade inicial
 no momento da interação;
no momento da interação; - e que o vetor campo magnético no referencial adotado é ;
Podemos estabelecer pelo menos três resultados:
Carga elétrica em repouso
"Um campo magnético estacionário não interage com cargas em repouso."
Tendo um Ímã posto sobre um referencial arbitrário R, se uma partícula com carga q for abandonada em sua vizinhança com velocidade nula não será observado o surgimento de força magnética sobre esta partícula, sendo ela positiva, negativa ou neutra.
Carga elétrica com velocidade na mesma direção do campo
"Um campo magnético estacionário não interage com cargas que tem velocidade não nula na mesma direção do campo magnético."
Sempre que uma carga se movimenta na mesma direção do campo magnético, sendo no seu sentido ou contrário, não há aparecimento de força eletromagnética que atue sobre ela. Um exemplo deste movimento é uma carga que se movimenta entre os polos de um Ímã. A validade desta afirmação é assegurada independente do sinal da carga estudada.
Efeitos de um campo magnético sobre cargas
Carga elétrica com velocidade em direção diferente do campo elétrico
Quando uma carga é abandonada nas proximidades de um campo magnético estacionário com velocidade em direção diferente do campo, este interage com ela. Então esta força será dada pelo produto entre os dois vetores, e e resultará em um terceiro vetor perpendicular a ambos, este é chamado um produto vetorial e é uma operação vetorial que não é vista no ensino médio.
Mas podemos dividir este estudo para um caso peculiar onde a carga se move em direção perpendicular ao campo, e outro onde a direção do movimento é qualquer, exceto igual a do campo.
- Carga com movimento perpendicular ao campo
Experimentalmente pode-se observar que se aproximarmos um ímã de cargas elétricas com movimento perpendicular ao campo magnético, este movimento será desviado de forma perpendicular ao campo e à velocidade, ou seja, para cima ou para baixo. Este será o sentido do vetor força magnética.
Para cargas positivas este desvio acontece para cima:
E para cargas negativas para baixo.
A intensidade de será dada pelo produto vetorial  , que para o caso particular onde e são perpendiculares é calculado por:
, que para o caso particular onde e são perpendiculares é calculado por:
A unidade adotada para a intensidade do Campo magnético é o tesla (T), que denomina  , em homenagem ao físico iugoslavo Nikola Tesla.
, em homenagem ao físico iugoslavo Nikola Tesla.
Consequentemente a força será calculada por:
Medida em newtons (N)
- Carga movimentando-se com direção arbitrária em relação ao campo
Como citado anteriormente, o caso onde a carga tem movimento perpendicular ao campo é apenas uma peculiaridade de interação entre carga e campo magnético. Para os demais casos a direção do vetor será perpendicular ao vetor campo magnético e ao vetor velocidade .
Para o cálculo da intensidade do campo magnético se considera apenas o componente da velocidade perpendicular ao campo, ou seja,  , sendo
, sendo  o ângulo formado entre e então substituindo v por sua componente perpendicular teremos:
o ângulo formado entre e então substituindo v por sua componente perpendicular teremos:
Aplicando esta lei para os demais casos que vimos anteriormente, veremos que:
- se v = 0, então F = 0
- se = 0° ou 180°, então sen = 0, portanto F = 0
- se = 90°, então sen = 1, portanto
 .
.
Regra da mão direita
Um método usado para se determinar o sentido do vetor é a chamada regra da mão direita espalmada. Com a mão aberta, se aponta o polegar no sentido do vetor velocidade e os demais dedos na direção do vetor campo magnético.
Para cargas positivas, vetor terá a direção de uma linha que atravessa a mão, e seu sentido será o de um vetor que sai da palma da mão.
Para cargas negativas, vetor terá a direção de uma linha que atravessa a mão, e seu sentido será o de um vetor que sai do dorso da mão, isto é, o vetor que entra na palma da mão.
Efeito Hall
Em 1879, durante experiências feitas para se medir diretamente o sinal dos portadores de carga em um condutor Edwin H. Hall percebeu um fenômeno peculiar.
Na época já se sabia que quando o fio percorrido por corrente elétrica era exposto a um campo magnético as cargas presentes neste condutor eram submetidos a uma força que fazia com que seu movimento fosse alterado.
No entanto, o que Edwin Hall descreveu foi o surgimento de regiões com carga negativa e outras com carga positiva no condutor, criando um campo magnético perpendicular ao campo gerado pela corrente principal.
Em sua homenagem este efeito ficou conhecido como Efeito Hall.
Força magnética sobre um fio condutor
Sempre que uma carga é posta sobre influência de um campo magnético, esta sofre uma interação que pode alterar seu movimento. Se o campo magnético em questão for uniforme, vimos que haverá uma força agindo sobre a carga com intensidade  , onde
, onde  é o ângulo formado no plano entre os vetores velocidade e campo magnético. A direção e sentido do vetor
é o ângulo formado no plano entre os vetores velocidade e campo magnético. A direção e sentido do vetor  serão dadas pela regra da mão direita espalmada.
serão dadas pela regra da mão direita espalmada.
Se imaginarmos um fio condutor percorrido por corrente, haverá elétrons livres se movimentando por sua secção transversal com uma velocidade  . No entanto, o sentido adotado para o vetor velocidade, neste caso, é o sentido real da corrente ( tem o mesmo sentido da corrente). Para facilitar a compreensão pode-se imaginar que os elétrons livres são cargas positivas.
. No entanto, o sentido adotado para o vetor velocidade, neste caso, é o sentido real da corrente ( tem o mesmo sentido da corrente). Para facilitar a compreensão pode-se imaginar que os elétrons livres são cargas positivas.
Como todos os elétrons livres têm carga (que pela suposição adotada se comporta como se esta fosse positiva), quando o fio condutor é exposto a um campo magnético uniforme, cada elétron sofrerá ação de uma força magnética.
Mas se considerarmos um pequeno pedaço do fio ao invés de apenas um elétron, podemos dizer que a interação continuará sendo regida por , onde Q é a carga total no segmento do fio, mas como temos um comprimento percorrido por cada elétron em um determinado intervalo de tempo, então podemos escrever a velocidade como:
Ao substituirmos este valor em teremos a força magnética no segmento, expressa pela notação  :
:
Mas sabemos que  indica a intensidade de corrente no fio, então:
indica a intensidade de corrente no fio, então:
Sendo esta expressão chamada de Lei Elementar de Laplace.
A direção e o sentido do vetor são perpendicular ao plano determinado pelos vetores e  , e pode ser determinada pela regra da mão direita espalmada, apontando-se o polegar no sentido da corrente e os demais dedos no sentido do vetor .
, e pode ser determinada pela regra da mão direita espalmada, apontando-se o polegar no sentido da corrente e os demais dedos no sentido do vetor .
Saiba mais...
Se quisermos determinar a força magnética que atua em fio extenso (com dimensões não desprezíveis) devemos fazer com que os comprimentos
Para o caso particular onde o condutor é retilíneo, todos os vetores serão iguais, então podemos reescrever a Lei elementar de Laplace como
|
Da mesma forma como um campo magnético uniforme interage com um condutor retilíneo pode interagir com um condutor em forma de espira retangular percorrido por corrente.
Quando a corrente passa pelo condutor nos segmentos onde o movimento das cargas são perpendiculares ao vetor indução magnética há a formação de um "braço de alavanca" entre os dois segmentos da espira, devido ao surgimento de  . Nos segmentos onde o sentido da corrente é paralelo ao vetor indução magnética não há surgimento de pois a corrente, e por consequência
. Nos segmentos onde o sentido da corrente é paralelo ao vetor indução magnética não há surgimento de pois a corrente, e por consequência  , tem mesma direção do campo magnético.
, tem mesma direção do campo magnético.
Se esta espira tiver condições de girar livremente, a força magnética que é perpendicular ao sentido da corrente e ao campo magnético causará rotação. À medida que a espira gira a intensidade da força que atua no sentido vertical, que é responsável pelo giro, diminui, de modo que quando a espira tiver girado 90° não haverá causando giro, fazendo com que as forças de cada lado do braço de alavanca entrem em equilíbrio.
No entanto, o movimento da espira continua, devido à inércia, fazendo com que esta avance contra as forças . Com isso o movimento segue até que as forças o anulem e volta a girar no sentido contrário, passando a exercer um movimento oscilatório.
Uma forma de se aproveitar este avanço da posição de equilíbrio é inverter o sentido da corrente, fazendo com que o giro continue no mesmo sentido. Este é o princípio de funcionamento dos motores de corrente contínua, e a inversão de corrente é obtida através de um anel metálico condutor dividido em duas partes.
Fluxo de Indução
Para que se entenda o que é, e como se origina a indução magnética é necessário que definamos uma grandeza física chamada fluxo de indução magnética. Esta grandeza é vetorial é simbolizada por Φ.
Mesmo que haja fluxo de indução magnética sobre qualquer corpo, independente de sua forma ou material, vamos defini-lo apenas para o caso particular de uma superfície plana de área superficial A, podendo ser a área delimitada por uma espira, imersa em um campo magnético uniforme, desta forma:
Então podemos escrever o fluxo de indução magnética como o produto do vetor indução magnética (campo magnético)  pela área da superfície A e pelo cosseno do ângulo θ, formado entre e uma linha perpendicular à superfície, chamada reta normal. Assim:
pela área da superfície A e pelo cosseno do ângulo θ, formado entre e uma linha perpendicular à superfície, chamada reta normal. Assim:
A unidade adotada para se medir o fluxo de indução magnética pelo SI é o weber (Wb), em homenagem ao físico alemão Wilhelm Webber, e caracteriza tesla por metro quadrado  .
.
É possível também se associar o fluxo de indução magnética à quantidade de linhas de indução que atravessam a superfície, de modo que:
- Se a reta normal à superfície for perpendicular ao vetor indução magnética, nenhuma linha de indução o atravessará, portanto o fluxo será nulo. O que é comprovado pela equação do fluxo magnético já que

- Se a reta normal à superfície for paralela ao vetor indução magnética, o número máximo de linhas de indução o atravessará, logo o valor do fluxo será máximo já que
 e que
e que  onde
onde  .
.
Se o vetor indução magnética e a área são valores constante e apenas o ângulo θ é livre para variar, então podemos montar um gráfico de Φxθ, onde veremos a variação do fluxo em função da variação de θ, em uma senoide defasada de  (gráfico do cosseno).
(gráfico do cosseno).
Variação do Fluxo Magnético
Saber apenas calcular o fluxo magnético não resolve nossos problemas de indução, pois para que esta exista, é necessário que haja variação no fluxo magnético.
Sabendo que o fluxo magnético é calculado por:
Como a equação nos mostra, o fluxo depende de três grandezas, B, A, e θ. Portanto, para que Φ varie é necessário que pelo menos uma das três grandezas varie, como veremos a seguir.
Variação do fluxo devido à variação do vetor indução magnética
Imagine um tubo capaz de conduzir em seu interior as linhas de indução geradas por um ímã, por exemplo. Se em um ponto do tubo houver uma redução na área de sua secção transversal, todas as linhas que passavam por uma área A terão de passar por uma área A', menor que a anterior. A única forma de todas as linhas de indução passarem, ou seja, de se manter o fluxo, por esta área menor é se o vetor indução aumentar, o que nos leva a concluir que as linhas de indução devem estar mais próximas entre si nas partes onde a área é menor. Como as secções transversais no tubo citadas são paralelas entre si, esta afirmação pode ser expressa por:
Então, se pensarmos em um ímã qualquer, este terá campo magnético mais intenso nas proximidades de seus pólos, já que as linhas de indução são mais concentradas nestes pontos. Portanto, uma forma de fazer com que Φ varie é aproximar ou afastar a superfície da fonte magnética, variando
Variação do fluxo devido à variação da área
Outra maneira utilizada para se variar Φ é utilizando um campo magnético uniforme e uma superfície de área A.
Como o campo magnético uniforme é bem delimitado, é possível variar o fluxo de indução magnética movimentando-se a superfície perpendicularmente ao campo, entre a parte sob e fora de sua influência. Desta forma, a área efetiva por onde há fluxo magnético varia.
Variação do fluxo devido à variação do ângulo θ
Além das duas formas citadas acima, ainda é possível variar Φ fazendo com que varie o ângulo entre a reta normal à superfície e o vetor . Uma maneira prática e possivelmente a mais utilizada para se gerar indução magnética é fazendo com que a superfície por onde o fluxo passa gire, fazendo com que θ varie.
Indução Eletromagnética
Quando uma área delimitada por um condutor sofre variação de fluxo de indução magnética é criado entre seus terminais uma força eletromotriz (fem) ou tensão. Se os terminais estiverem ligados a um aparelho elétrico ou a um medidor de corrente esta força eletromotriz ira gerar uma corrente, chamada corrente induzida.
Este fenômeno é chamado de indução eletromagnética, pois é causado por um campo magnético e gera correntes elétricas.
A corrente induzida só existe enquanto há variação do fluxo, chamado fluxo indutor.
Lei de Lenz
Segundo a lei proposta pelo físico russo Heinrich Lenz, a partir de resultados experimentais, a corrente induzida tem sentido oposto ao sentido da variação do campo magnético que a gera.
- Se houver diminuição do fluxo magnético, a corrente induzida irá criar um campo magnético com o mesmo sentido do fluxo;
- Se houver aumento do fluxo magnético, a corrente induzida irá criar um campo magnético com sentido oposto ao sentido do fluxo.
Se usarmos como exemplo, uma espira posta no plano de uma página e a submetermos a um fluxo magnético que tem direção perpendicular à página e com sentido de entrada na folha.
- Se
 for positivo, ou seja, se a fluxo magnético aumentar, a corrente induzida terá sentido anti-horário;
for positivo, ou seja, se a fluxo magnético aumentar, a corrente induzida terá sentido anti-horário; - Se for negativo, ou seja, se a fluxo magnético diminuir, a corrente induzida terá sentido horário.
Correntes de Foucault
Quando um fluxo magnético varia através de uma superfície sólida, e não apenas delimitada por um condutor como foi visto em indução eletromagnética, há criação de uma corrente induzida sobre ele como se toda superfície fosse composta por uma combinação de espiras muito finas justapostas.
O nome dado a estas correntes é em homenagem ao físico e astrônomo francês Jean Bernard Léon Foucault, que foi quem primeiro mostrou a existência delas.
Devido à suas dimensões consideráveis, a superfície sofre dissipação de energia por efeito Joule, causando grande aumento de temperatura, o que torna possível utilizar estas correntes como aquecedores, por exemplo, em um forno de indução, que têm a passagem de correntes de Foucault como princípio de funcionamento.
Em circuitos eletrônicos, onde a dissipação por efeito Joule é altamente indesejável, pois pode danificar seus componentes. É frequente a utilização de materiais laminados ou formados por pequenas placas isoladas entre si, a fim de diminuir a dissipação de energia.
Lei de Faraday-Neumann
Também chamada de lei da indução magnética, esta lei, elaborada a partir de contribuições de Michael Faraday, Franz Ernst Neumann e Heinrich Lenz entre 1831 e 1845, quantifica a indução eletromagnética.
A lei de Faraday-Neumann relaciona a força eletromotriz gerada entre os terminais de um condutor sujeito à variação de fluxo magnético com o módulo da variação do fluxo em função de um intervalo de tempo em que esta variação acontece, sendo expressa matematicamente por:
O sinal negativo da expressão é uma consequência da Lei de Lenz, que diz que a corrente induzida tem um sentido que gera um fluxo induzido oposto ao fluxo indutor.
Transformadores
Os transformadores de tensão, chamados normalmente de transformadores, são dispositivos capazes de aumentar ou reduzir valores de tensão.
Um transformador é constituído por um núcleo, feito de um material altamente imantável, e duas bobinas com número diferente de espiras isoladas entre si, chamadas primário (bobina que recebe a tensão da rede) e secundário (bobina em que sai a tensão transformada).
O seu funcionamento é baseado na criação de uma corrente induzida no secundário, a partir da variação de fluxo gerada pelo primário.
A tensão de entrada e de saída são proporcionais ao número de espiras em cada bobina. Sendo:
Onde:
 é a tensão no primário;
é a tensão no primário; é a tensão no secundário;
é a tensão no secundário; é o número de espiras do primário;
é o número de espiras do primário; é o número de espiras do secundário.
é o número de espiras do secundário.
Por esta proporcionalidade concluímos que um transformador reduz a tensão se o número de espiras do secundário for menor que o número de espiras do primário e vice-verso.
Se considerarmos que toda a energia é conservada, a potência no primário deverá ser exatamente igual à potência no secundário, assim:
Nenhum comentário:
Postar um comentário
Commented